Paso 3: Registros de desplazamiento

Hasta ahora hemos visto cómo podemos usar el Arduino para controlar muchas entradas y salidas digitales a la vez, pero a veces queremos a más componentes que el Arduino tiene pines para control. En este caso, podemos utilizar un externo circuito integrado (también llamado un "chip") para ampliar las entradas y salidas de Arduino.
Registros de desplazamiento son chips que utilizan puertas lógicas para muchas entradas o salidas de control a la vez. Son intrínsecamente digitales, como los pernos digitales de Arduino - esto significa que sólo puede leer o escribir a 0V y 5V (bajo o alto). Si usted está buscando algo expandir sus entradas analógicas entonces querrá un demultiplexor como 4051 (Lea más acerca de cómo hacer eso aquí). En este Instructable que voy mirando el 74HC595 shift register (llamado el "595"), es muy popular porque pueden ampliar a 3 salidas digitales del Arduino en 8 salidas.
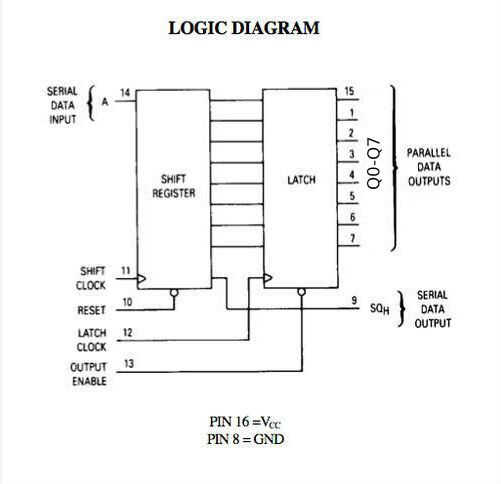
La 595 tiene 8 pines de salida etiquetados Q0-Q7 (a veces también llamado Qa-Qh), no puede leer datos de estos pines, sólo pueden ser utilizados como salidas (si usted está buscando un registro de desplazamiento con 8 pines de entrada, revisa el 74HC165, tutorial aquí). El 595 es controlada por tres conexiones, se llaman los datos patillas, clavija de enganche y reloj. Consulte el diagrama de flujo de arriba para ver cómo controlar los pines de salida (repetidos abajo):
- en primer lugar, la clavija de enganche (etiquetado como "reloj de cierre" en el segundo diagrama arriba) se encuentra bajo para desactivar los pines de salida (etiquetado como "salidas de datos en paralelo"), de esta manera que no va a cambiar las clavijas de salida que estamos enviando en nuevos datos a la 595
- siguiente, los nuevos datos se enviaron a la 595 pulsando el pin clock ("reloj del cambio") y enviando a cada uno de 8 Estados de la salida por el pin de datos ("entrada de datos en serie") uno por uno. Arduino tiene una función útil en su librería llamada shiftOut que se encarga de esto para usted, voy a explicar cómo hacer esto en el siguiente paso.
- Finalmente, ajuste la clavija de enganche de alta. Envía tus nuevos datos a todos los pernos hechos salir a la vez (llamado URL de salida).




")
 para registro de datos")







