Paso 5: Construcción circuitos - el resto de cableado
Los faros deben cablearse separable de la placa por lo que se puede montar mirando hacia adelante. Yo no hice esto porque no tenía tiempo.
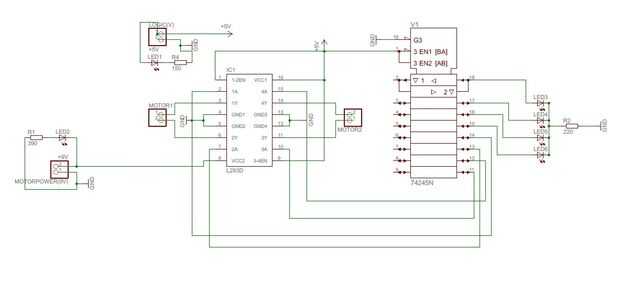
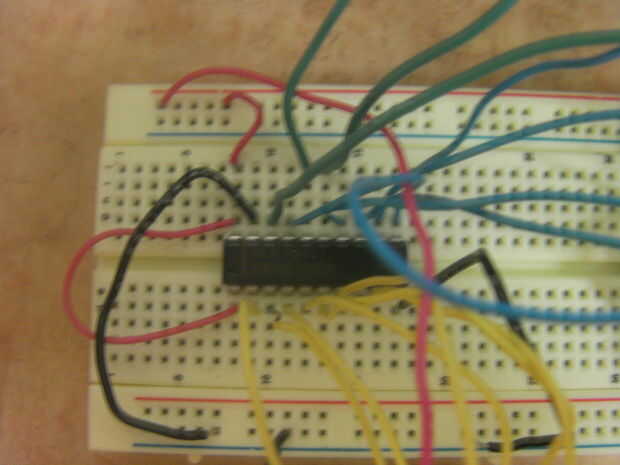
Hay 4 puertos en el chip que se utiliza para controlar el LED para no sobrecargar un puerto. Alambré un LED por puerto sin embargo podría alambre tantas como desee sin sobrecargar el circuito.
El LED del alambre a los pines 15-18 Asegúrese de que utiliza resistencias y la polaridad es correcta!
Interruptor de inclinación de mercurio
Usé un interruptor de inclinación de mercurio para 2 entradas porque para conseguir marcas completas necesitaba utilizar las entradas de Arduino. Realmente no es necesario.
El interruptor de inclinación se usa para decirle si el robot va a caer o está en una colina. controla la etiqueta de estado de la interfaz.
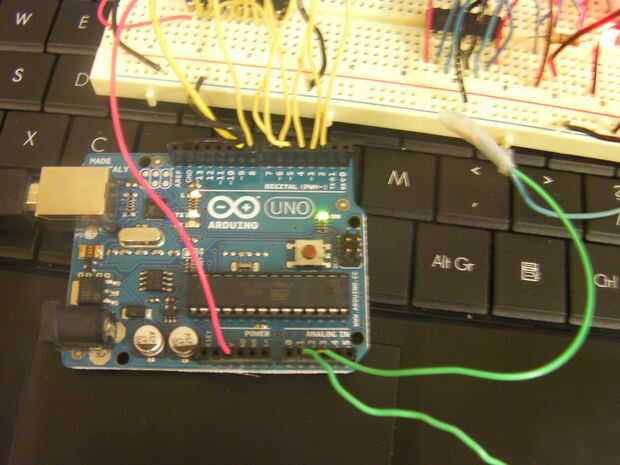
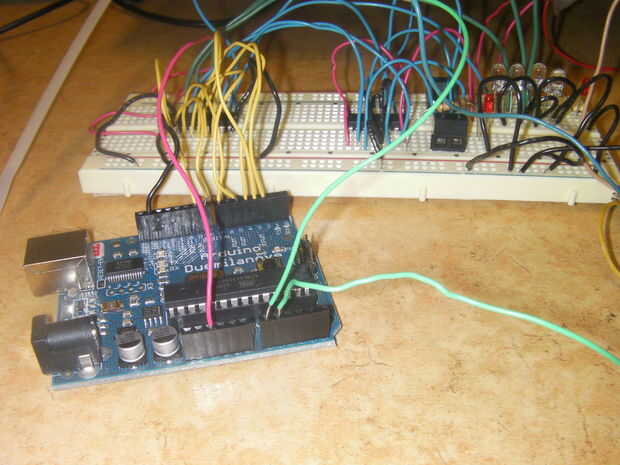
En una inclinación del interruptor hay 3 cables, 1 necesita energía constante y los otros 2 conectarse a las entradas analógicas del Arduino 0 y 1.
Usted tendrá que hacer algunas pruebas para ver qué cables van fueron en el suyo.








")




