Paso 3: Paso 3: los componentes eléctricos
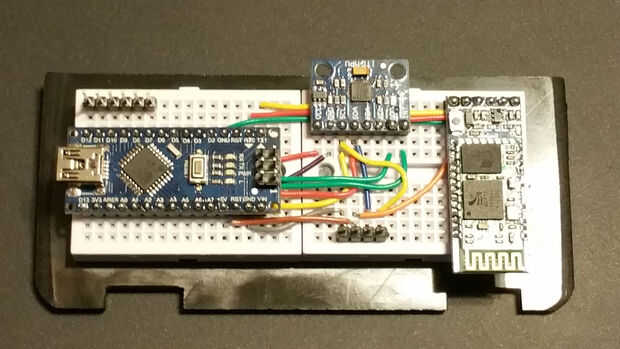
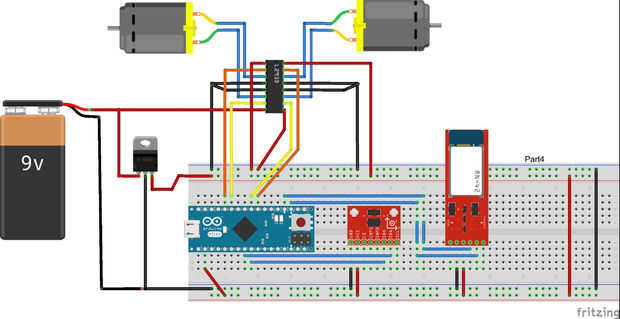
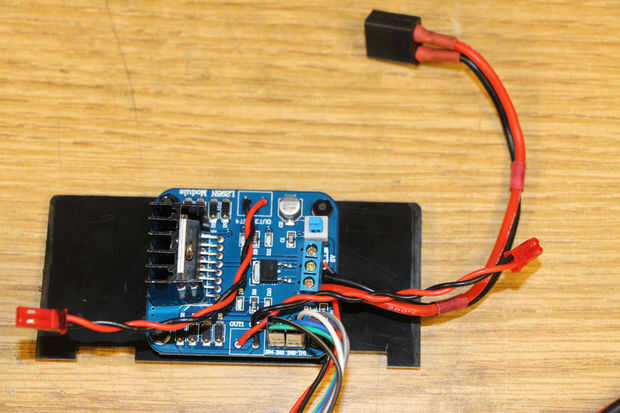
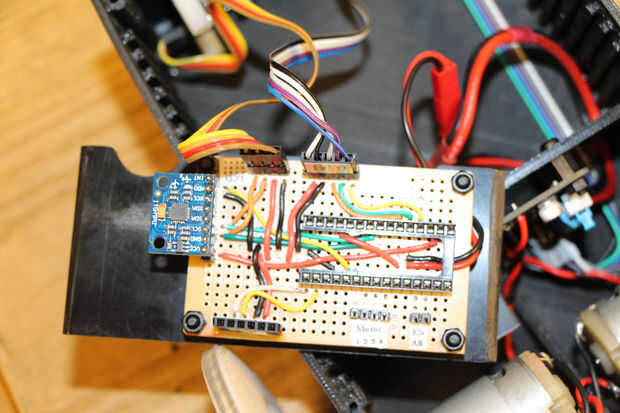
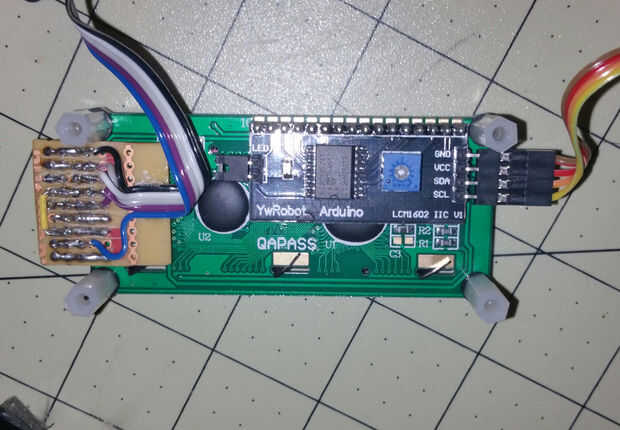
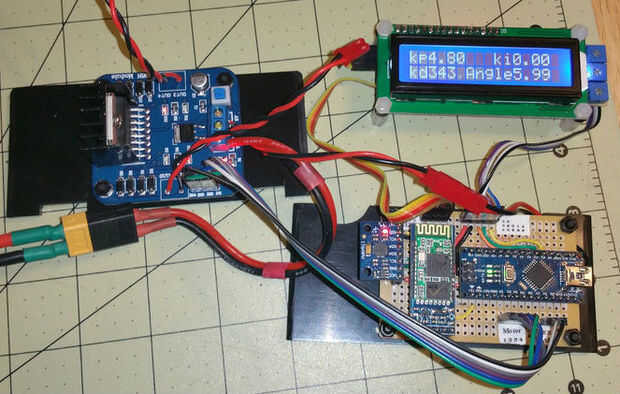
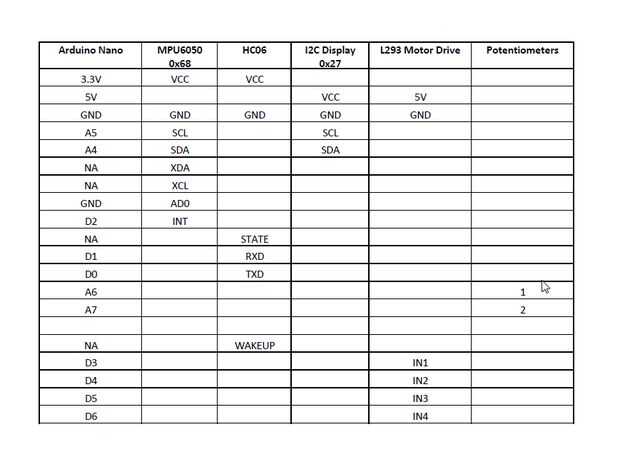
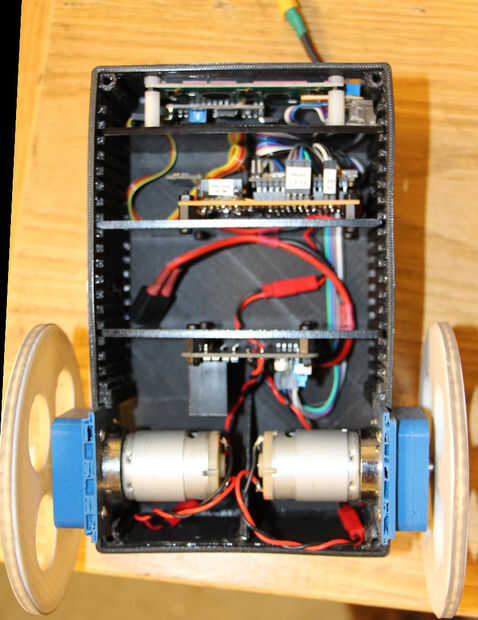
La primera etapa del robot era crear un robot que podía conducir con mi Bluetooth en mi celular. Esto se puede hacer en un tablero de pan usando Arduino, el módulo Bluetooth HC-05 y el regulador del motor de L298D. He incluido una hoja de conexión del alambre que indica que los cables van a que pines. El Arduino, el módulo Bluetooth y la MPU6050 (sólo es necesario añadir capacidades de equilibrio del uno mismo) todo ajuste en la misma bandeja de componentes que se desliza dentro del cuerpo principal. El regulador del motor encaja en una segunda bandeja una tercera bandeja los bloqueos y la pantalla LCD en el compartimiento superior.
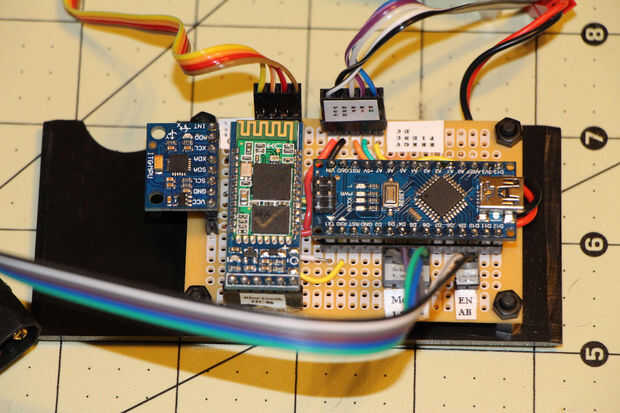
La segunda fase de esta construcción agregará la capacidad para balancear a 2 ruedas. El diseño original fue hecho en un tablero de pan, pero durante las pruebas de la fase de equilibrio del proyecto, la cinta sería vibrar demasiado y soltarse cuando el robot cayó cables y MPU6050.
He utilizado cables de cinta de medida de longitud que se ejecutan a lo largo de la pared posterior para una instalación más limpia a mano.
Por último, los motores se atornillan los soportes del motor y deslice simplemente en sus respectivos canales de c en la parte inferior de la caja. Todas las bandejas y soportes del motor se mantienen en sus lugares por la tapa.






")






