Paso 5: Paso 5: montaje
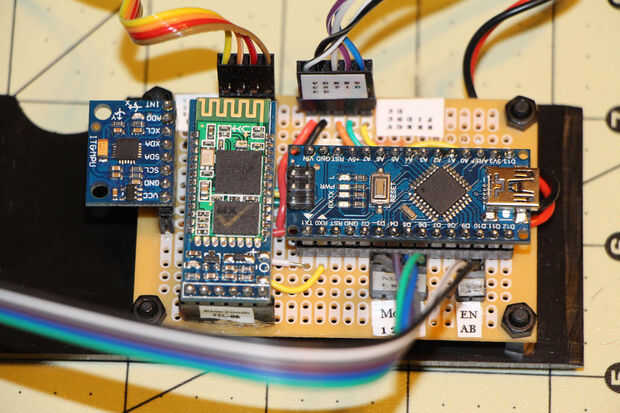

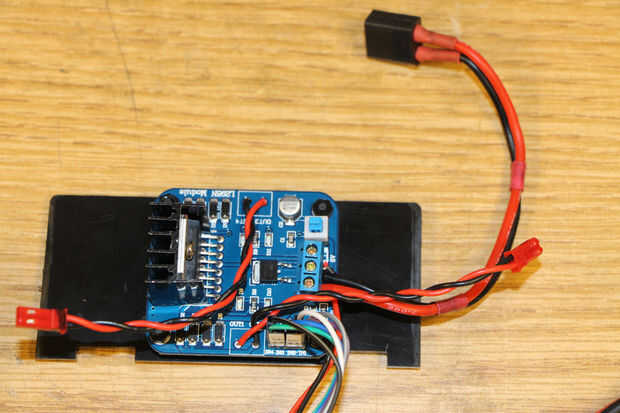
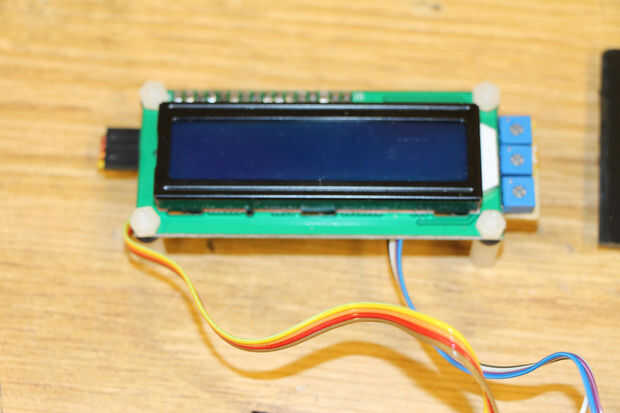


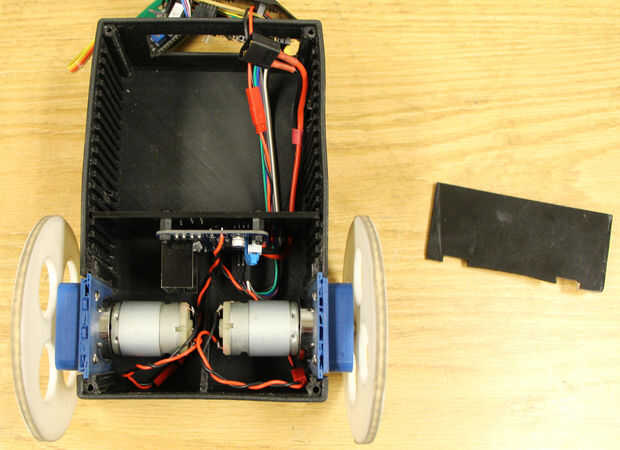
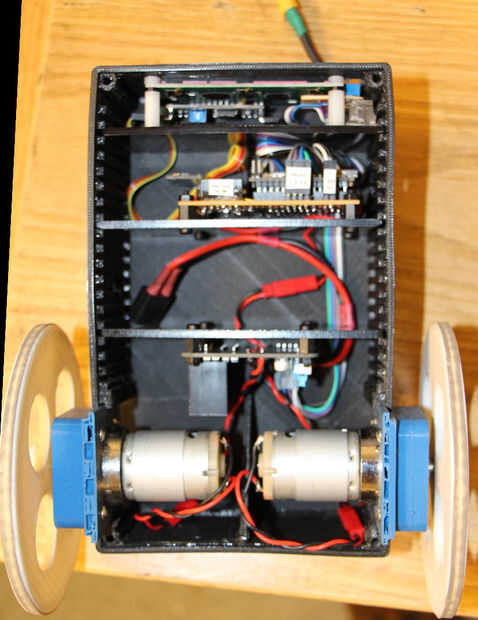
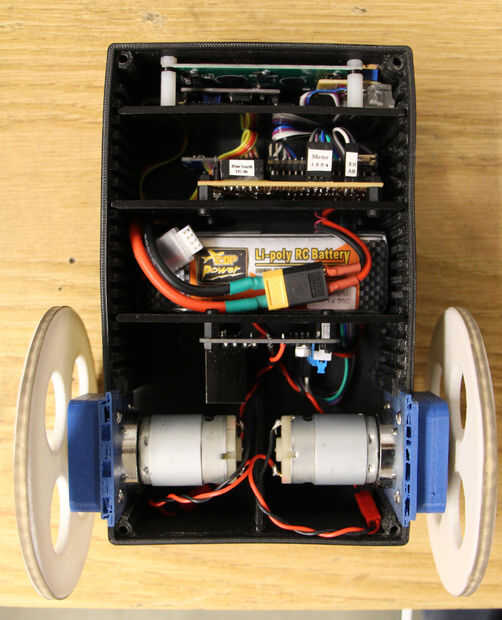

El primer paso en Asamblea es montar tu Arduino, Bluetooth y MPU6050 opcional en un tablero de pan o proto board, luego montar el tablero en una de las bandejas. Utilice los diagramas del paso 3 para las conexiones de montaje. El siguiente paso es pegar o los 2 pieza motor montaje del tornillo junto entonces Fije el motor al soporte con tornillos. Las ruedas son 3D impreso con los agujeros del eje del motor un poco demasiado pequeño y perforados a tamaño final allí poco menos de 6 mm para una presión antes de pegar gomas elásticas en el perímetro de las ruedas para el agarre. Para el regulador del motor unsoldered el poner bloques de terminales del controlador motor y soldar los cables del motor directamente al módulo porque los cables necesitan espacio libre en el caso de que no tienen los bloques de terminales. Instalar separadores de nylon en la pantalla LCD como se muestra en las fotos. Soldadura 3 10 k Potenciometro a un pequeño trozo de proto board con 5v y motivos en los pines exteriores de cada potenciómetro y los cables del pin centro comunes es las salidas de PID. Monte el módulo PID al lado de la pantalla LCD. La Asamblea LCD/PID se desliza en el agujero superior de la caja desde el interior después de dremeling una ranura sobre el lado que tiene el potenciómetro en él y una bandeja debajo de él lo bloquee en su lugar. Todos los tableros de conectar a la placa principal de Arduino con cables de cinta y deslícelos en la caja como se muestra en las fotos. Para el rover con ruedas tres una rueda pequeña de Lowes se une simplemente a la debajo de la caja con velcro. Instale una batería cargada, subir el código, enlace bluetooth y divertirse.






")






