Paso 8: Programación Arduino
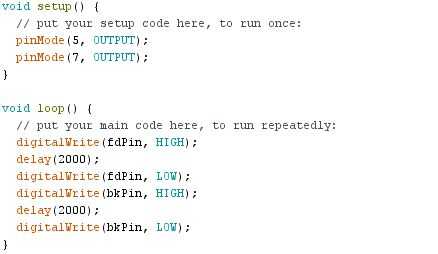
He escrito un sencillo "hacia atrás-adelante y hacia atrás" programa de Arduino, que actuará como el programa "Hola mundo" para este proyecto. Se adjunta a este paso; simplemente descárguelo, colocarlo en una carpeta con el mismo nombre, y poner esa carpeta en su carpeta de dibujo. Finalmente, abrirlo con el IDE de Arduino y subirlo a la placa. ¡ Felicidades! Te has vuelto un motor ordinario de K'nex en un motor controlado por Arduino "elegante"!
Si has estado siguiendo esta guía exactamente, entonces el pin digital 5 será su pin de avance, y pin digital 7 será su pin al revés. Para conducir el motor hacia adelante o hacia atrás, establecer estos pines alta o baja en las siguientes modalidades:
- Adelante pin pin al revés, alta baja: Motor se pone en marcha
- Pin delantero baja, pin al revés alto: Motor va hacia atrás
- Adelante Perno perno alto, al revés alto: no se mueve Motor
- Pin delantero baja, perno hacia atrás baja: no se mueve Motor
Para escribir tus propios movimientos personalizados, simplemente fijar los pernos de adecuada alto o bajo, entonces utiliza la función delay() a esperar el adecuado número de milisegundos. También tenga en cuenta que, debido a que los motores K'nex son motores de corriente continua, van a ser muy imprecisos, haciendo movimientos de precisión o máquinas del CNC de K'nex imposible.








![Línea de arduino motor escudo] siguiente robot (FC-51)](https://foto.askix.com/thumb/170x110/b/06/b06d7be12d3b25ef8f1cbac2cc667e38.jpg "Línea de arduino motor escudo] siguiente robot (FC-51)")




