Paso 1: Construcción: modificar los servos


Fotos:
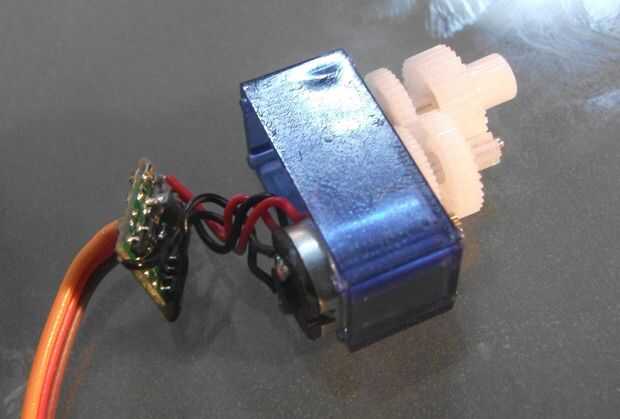
- Quite los tornillos pequeños y abrir la caja
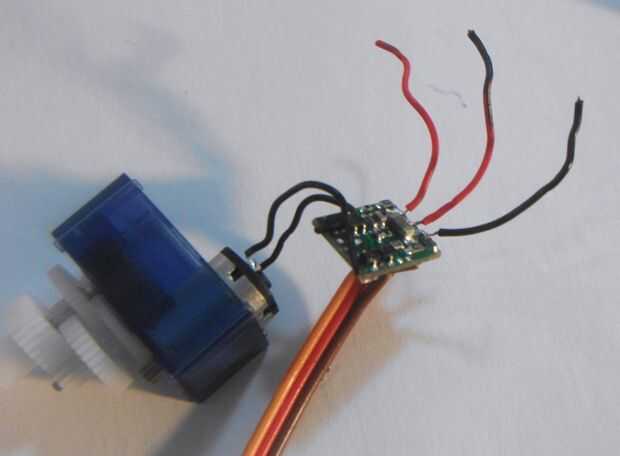
- Cortar los cables del potenciómetro, son donde se fijan las resistencias
- Si usted tiene resistores de montaje superficial, colocar un 5k (1k a 10k deben trabajar) en el teclado de cada uno de los botones de lado para la almohadilla del medio, si no gire un par de a resistencias de agujero como este
- Salir de la parada en el potenciómetro con unos alicates pequeños, usted necesita el bote para su uso como un cojinete de giro
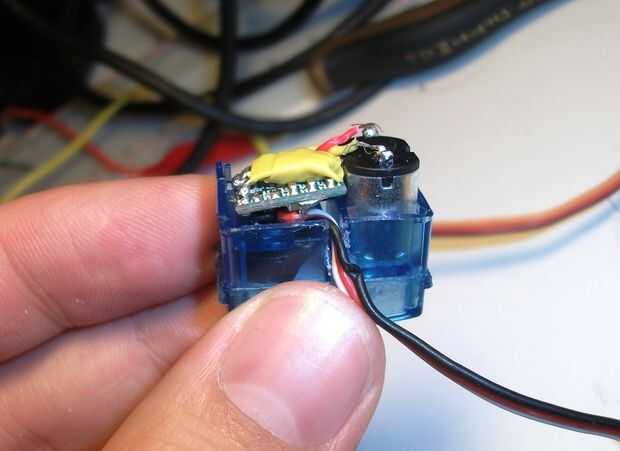
- soldadura de las resistencias, si se utiliza el par de orificio más, recomiendo liar en cinta eléctrica como tal. Para el servo que irá en la parte delantera, corte una ranura para el cable de salida por el lado por lo que no viene por debajo del robot.
- (no se muestra) Antes de cerrar para arriba, poner un agujero en la parte posterior de la caja enfrente de la spline para montar la polea (rueda con sin dientes).
- Uso algunos de ángulo de cortadores o alicates para quitar cualquier bridas de montaje de los casos y archivo o pulir las crestas salen, estos pueden obtener de la manera más adelante.





")







