Paso 4: Construcción: Conecte los cables a la toma de
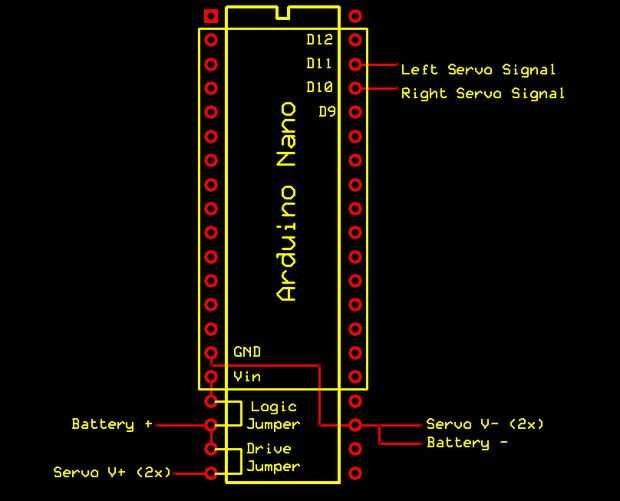
En mi caso había conectado los servos en D11 y D10, pero puede utilizar cualquiera de las salidas PWM, como se muestra en la primera imagen a continuación. Entonces alambré la batería a un pin gratis en el zócalo entre alfileres que conectado a la potencia para el arduino (Vin) y los servos, por lo que pude cambiarlos enciende y apaga con puentes. Rompieron las patas de la toma hacia fuera para que sean fáciles de acceder para expansiones. Tenga en cuenta que esta colocación también hace los botones de conexión y reset USB de fácil acceso, en el extremo del robot.
Para cargar la batería, power puede ser aplicado por poner los jumpers en la posición de apagado (almacenada en el otro lado de la toma) y conectar carga conduce en batería y de tierra. Otra vez, para esta batería el método de carga más fácil es conectar pinzas de Caimán a las salidas de un 1.5-9V NiCd cargador. Si está usando un tipo diferente de carga de la batería en consecuencia.





")







