Paso 2: Conecte el Motor y el conductor del Motor, el conductor del Motor para el Arduino
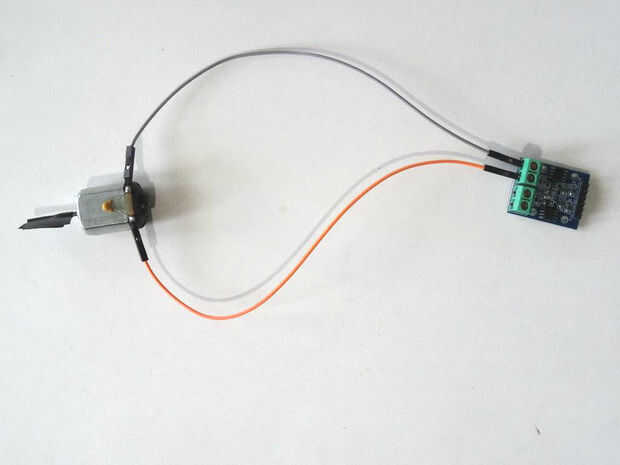
Para hacer más fácil ver la rotación del motor, he pegado un trozo de cinta aislante negra sobre el eje del motor.
Puesto que la junta puede controlar 2 motores - canal A y B, y utilizamos solamente un motor para simplificar, aquí se conectará sólo canal a canal B puede ser conectado y utiliza la misma forma.
- Conecte el Motor a los puntos de conexión de control del motor canal A del Controlador de Motor Dual L9110S (foto 1)
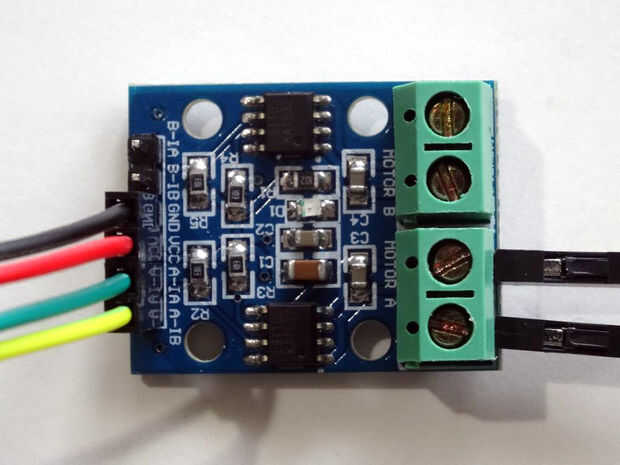
- Conectar macho hembra cable de tierra(cable negro) al pin de tierra del tablero de Conductor del Motor (foto 2)
- Conexión hembra-hembra cable(cable rojo) con el conector de alimentación del tablero de Conductor del Motor (foto 2)
- Conecte el hembra Control de velocidad(cable verde) al pin Control(A) velocidad de canal A del tablero de Conductor del Motor (foto 2)
- Conecte el hembra Control de dirección(cable amarillo) al pin de Dirección Control(B) de canal A del tablero de Conductor del Motor (foto 2)
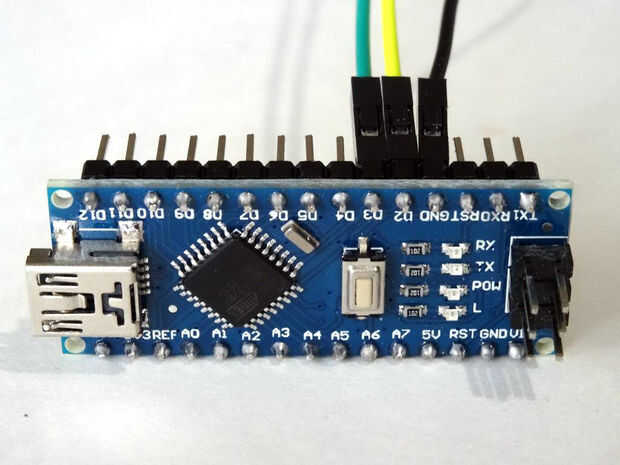
- Conecte el otro extremo del cable de Control de velocidad(cable verde) al pin Digital 3 de la placa de Arduino (foto 3)
- Conecte el otro extremo del cable de Control de dirección(cable amarillo) al Digital pin 2 de la placa de Arduino (foto 3)
- Conecte el otro macho hembra tierra(alambre negro) con el conector de tierra de la placa Arduino (foto 3) y dejar el extremo macho
 de tiempo Real DS1307 con Visuino")
 de tiempo Real DS1302 con Visuino")







 ultrasonidos I2C de distancia pantalla LCD 2 X 16 Visuino")
 con optoacoplador y Encoder de disco")


