
Me gustaría agradecer a mi profesor de física, Dr. Bert Pinsky, por ayudarme a hacer este proyecto exitoso.
También quiero dar las gracias a Karl Anderson (CEO de Teco neumática) por su generosa donación de partes esenciales para nuestro proyecto.
En este Instructable, te mostramos los pasos para construir un simulador de vuelo Arduino-neumática para que todos puedan disfrutar la diversión de la física, la robótica y la aviación.
Resumen:
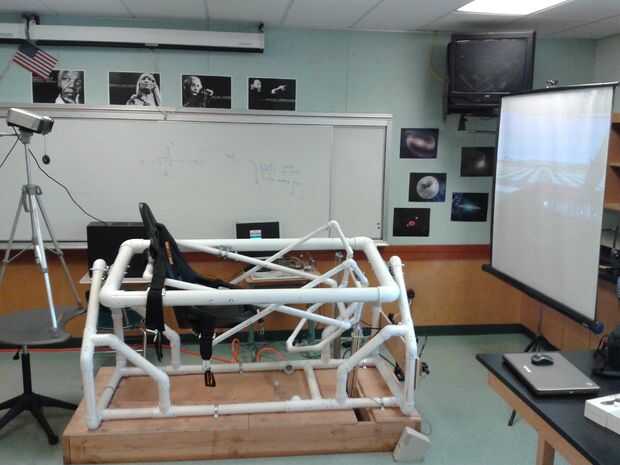
El simulador de vuelo de LifeBeam es básicamente una plataforma de movimiento que puede hacer rotaciones completas en sobre 40 grados de inclinación. Esto es un eficiente equivalente al tradicional simulador de la "Plataforma de Stewart". Nuestro simulador tiene mismo movimientos físicos (2DOF) excepto que sólo se ejecuta en dos cilindros neumáticos mientras que la plataforma Stewart necesita seis cilindros.
Concepto:
El simulador de vuelo de LifeBeam es una instalación completa del equipo que se ejecuta al mismo tiempo y colaboración. Los datos se envían en primer lugar de la gráfica o "Juegos PC" mediante un programa de software a la medida que adquiere los datos del juego. Los datos del juego es escalar y convertidos en coordenadas específicas para el roll y pitch eje (X e Y). El programa envía la señal de final que se recibe por un Arduino (Duemilanove). El Arduino tiene un programa complejo que combina los comandos serie y analiza ciertos valores para calcular un voltaje que es luego convertida en PWM y enviado a un filtro de paso bajo que suaviza el PWM en tensión analógica. La tensión analógica está conectada a un amplificador de válvula neumática que controla los cilindros neumáticos para hacer que la plataforma se mueva en consecuencia.
Demostración:
Esto es una demostración rápida de nuestro proyecto terminado. Lo tenemos todo funcionando y conectado el simulador con un joystick Logitech para poner a prueba el movimiento completo.









-neumáticos a prueba de")



