Paso 9: Prueba el simulador de vuelo
Para probar el simulador:
1. Encienda la energía a su Sistema de Control que las energías del Servo válvula amplificadores.
2. Encienda la computadora gráficos que mencionamos anteriormente.
3. Conecte el tubo del compresor de aire para el simulador.
4. Asegúrese que la válvula Servo los cables están conectados al amplificador Servo válvula.
5. Asegúrese de que el módulo de retroalimentación está correctamente conectado.
6. Enchufe su Arduino via USB a la computadora gráficos.
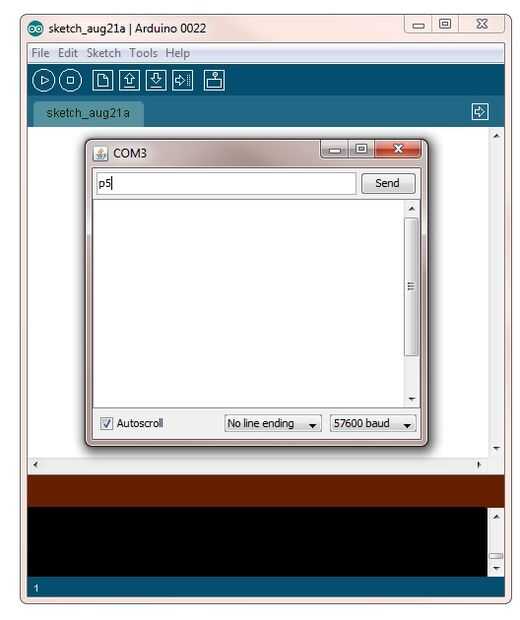
7. Abra el Serial Monitor de Arduino Sketchpad. Seleccione velocidad de 57600.
8. para probar el tono, tipo comandos uno por uno, tales como: p5 o p0 o p2.5
9. para probar el rollo, tipo comandos uno por uno como: r5 o r0 o r2.5
Afinando el simulador:
Hemos hecho mucho para ajustar el simulador para obtener el mejor rendimiento. Gran parte de este ajuste se realiza mediante el ajuste de unos potenciómetros del amplificador de la válvula Servo. Para afinar la neumática, debe tener una comprensión firme de control PID. Girando el potenciómetro en el amplificador de válvula Servo ayudará a estabilizar la velocidad y la sensibilidad de la neumática.
Para controlar el simulador de vuelo con un Joystick:
Usando mis habilidades de programación en desarrollo de aplicaciones. net, llevo 3 días haciendo un programa personalizado que te permite obtener la posición de un joystick USB con la API de DirectX.
¿Qué hace el programa?
Básicamente, mi programa hace lo siguiente:
1. posición de adquirir un joystick USB. Devuelve valores crudos de gran tamaño.
2. estos valores Obtén el escalar a un rango de 0-5 (para el Arduino), con un dos punto flotante decimal.
3. escribí una conversión inversa que invierte los valores de escalados. Tenemos que hacer la conversión inversa que el simulador seguirá el camino opuesto que queríamos ir. Los cilindros neumáticos se están moviendo hacia adentro cuando se da 5 voltios desde el Arduino. Realmente queremos lo contrario. En otras palabras, queremos hacia fuera cuando es 5 voltios.
4. el programa debe ser capaz de comunicarse con el Arduino en el Puerto COM serie a una velocidad de 57600 baudios. Escribí una función que nos permitirá conectarse a Arduino.
5. el Arduino y el software en el equipo va a hacer miles de "apretones" cada milisegundo. Estos "apretones" consisten en señales de atrás y de cuarto que Compruebe la posición del joystick y envían comandos de nuevo a Arduino.
El código para esto es bastante largo y complicado, así que proporcionará lo para las personas que construyeron su proyecto utilizando el mismo método. Una vez ya han probado el simulador trabajoy conecte el joystick USB y descargar el programa que yo a continuación.
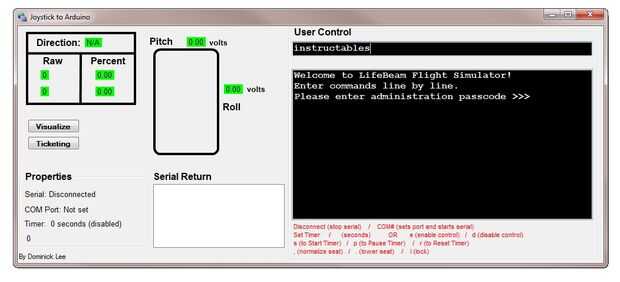
1. extraer la "carpeta comprimida" y ejecutar Joystick.exe
Si mueves el joystick alrededor, debe ver la tabla de datos en tiempo real.
2. la "contraseña administrativa" para el programa es: instructables
Pulse Intro después de escribir la contraseña.
3. Continuación, escriba el puerto COM que tu Arduino está situado en (p. ej. COM4). Pulse Intro.
4. tipo e y pulse enter para activar el control por joystick. Mueva lentamente la palanca de mando para controlar el simulador.
Cuando desea desactivar los controles, escriba d para desactivar.









-neumáticos a prueba de")



