

/ * SALIDA DE DAC DE ESCALERA RESISTIVA
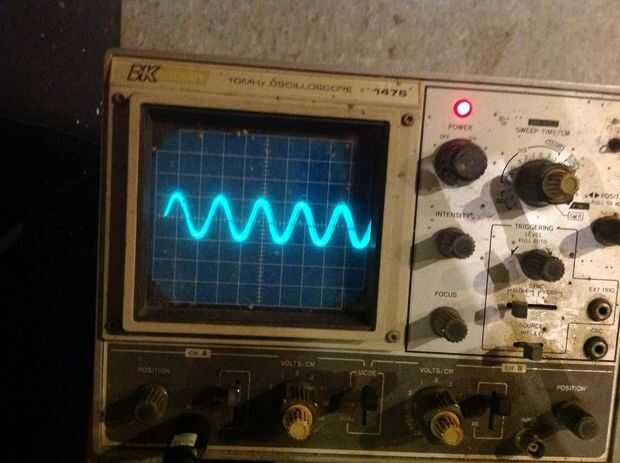
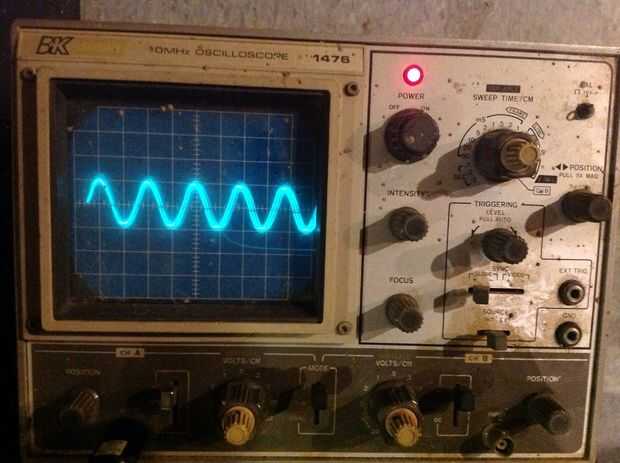
Esto producirá una onda senoidal Conecte una resistencia de 1 megohmio a cada pin del. Conectan todas las resistencias. En el punto común a medir una onda sinusoidal. Con un osciloscopio. Para crear una salida útil una alta impedancia amplificador es necesario. */
void setup() {pinMode(2,OUTPUT); pinMode(3,OUTPUT); pinMode(4,OUTPUT); pinMode(5,OUTPUT); pinMode(6,OUTPUT); pinMode(7,OUTPUT); pinMode(8,OUTPUT); pinMode(9,OUTPUT); pinMode(10,OUTPUT);}
void loop() {/ / llamada el lazo máximo 10.000 veces para (unsigned int lt = 0; lt < = 10000; lt ++) {/ / lt = tiempo de loop MaxFrequency();} delay(200); / / máximo lazo //Call final del bucle de frecuencia más baja 10.000 veces para (unsigned int LFlt = 0; LFlt < = 10000; LFlt++) {//LFlt = menor frecuencia tiempo de loop Frequency(10); / / 10 delayMicroseconds} delay(200); Llamada el lazo menor frecuencia 10.000 veces con un retardo más largo entre pasos para (unsigned int LFlt = 0; LFlt < = 10000; LFlt++) {//LFlt = menor frecuencia tiempo de loop Frequency(100); / / 100 delayMicroseconds} delay(200); Bajar frecuencia final / * Descomente este bloque para activar el barrido / / llamar a la función de frecuencia 200 veces el lazo es más menos lazos para (unsigned int St = 0; St < = 200; St ++) / / ST = tiempo de barrido {para (int F = 1; F < = 30; F = F + 1) / / F = retardo retardo largo = menor frecuencia {Frequency(F); / / F pasar tiempo en función de la frecuencia} para (int F = 50; F > = 1; F = F - 1) {Frequency(F);} delay(200); } / / FIN del bucle de frecuencia de barrido * / / / Uncoment para habilitar barrido}
void MaxFrequency() {para (int alto = 2; HASTA < = 10; UP++) / / contar pines 2-10 cambio o añadir pins aquí {digitalWrite (arriba,);} para (int abajo = 10; Hacia abajo > = 2; DOWN--) / / cuenta regresiva pernos 10-2 cambio o añadir pins aquí {digitalWrite (abajo, LOW);}}
anular la frecuencia (int tiempo) / tiempo = tiempo de retardo {para (int alto = 2; HASTA < = 10; UP++) / / contar pines 2-10 cambio o añadir pins aquí {digitalWrite (arriba,); delayMicroseconds(TIME);} para (int abajo = 10; Hacia abajo > = 2; ABAJO--) / / cuenta regresiva pernos 10-2 cambio o añadir pins aquí {digitalWrite (abajo, LOW); delayMicroseconds(TIME);
} delayMicroseconds(10); Esta élite para sincronización de osciloscopio}

")





")





