Paso 3: Sistema de Control e impresión 3D
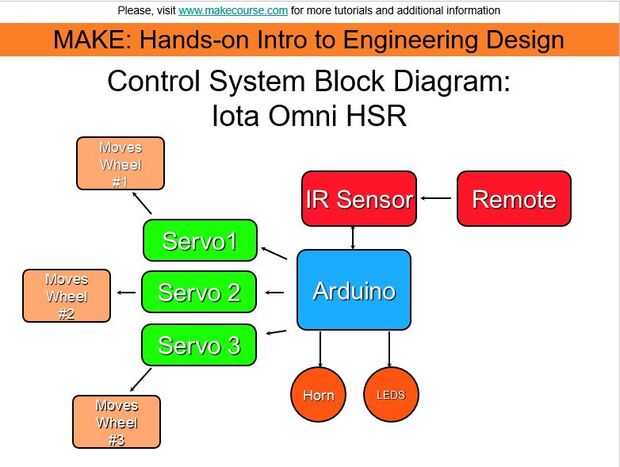
El diagrama de flujo de la idea de la rover va como sigue:
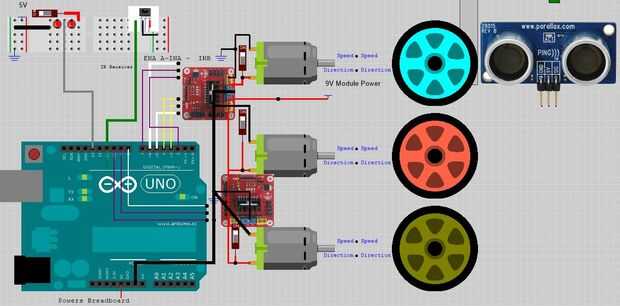
- El IR envía y código hexadecimal al receptor conectan al pin 11 de Arduino.
- El receptor decodifica y ejecuta una función. (ej.: parada de las ruedas, luces de destello, moverse rueda derecha y rueda trasera)
- Un a bordo interruptor rover on activa o desactiva.
- Ecos de sensor de proximidad y desencadena una función de si se cumple una condición. (es decir detener las ruedas si el obstáculo está cerca)
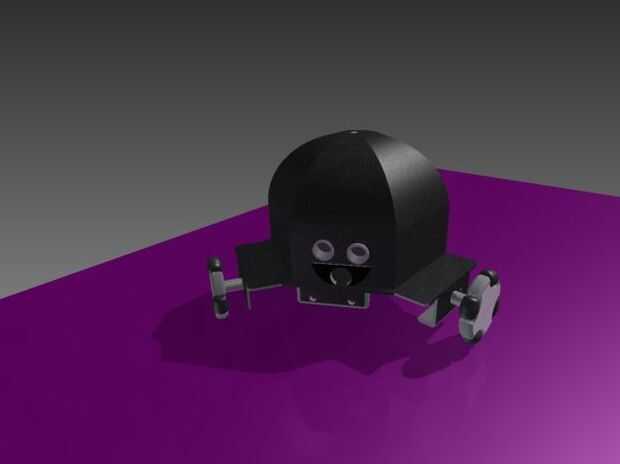
Impresiones 3D.
Esta impresión única tiene la base de un hexágono con una tapa en forma de cúpula. Cara de la cúpula tiene tres hoyos, dos 1 pulgadas para montar unos sensores de proximidad, un agujero de 1 1/2 pulgadas para el montaje opcional de la cámara. Hexágono mide pulgadas 3 lados con 2 lados (izquierda y derecha) que se extiende. La altura de la cúpula es tp 4 1/2 pulgadas 5.
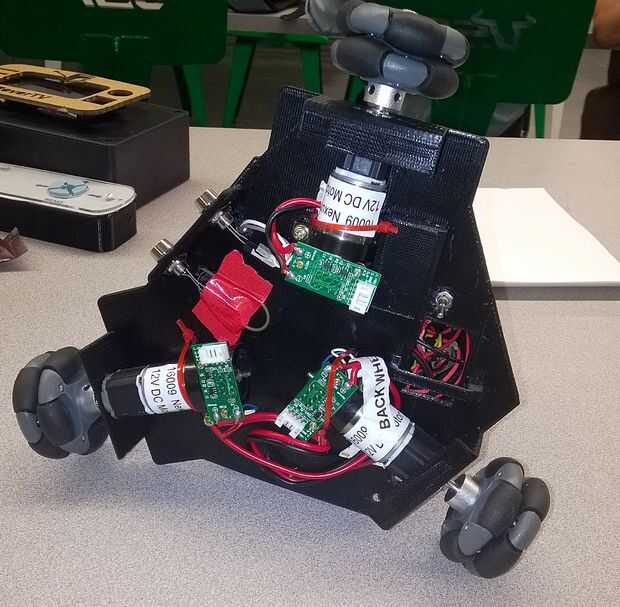
Chasis:
Tope extiende 1 pulgada hacia abajo. Tres soportes de motor y rueda extienden hacia abajo 2 cm. El agujero del soporte es 1 pulgada de diámetro con cuatro orificios de 1,5 mm que lo rodean. Hay aproximadamente 10 agujeros en forma circular sobre el chasis para mayor comodidad.
* Chasis y cúpula se abisagran juntos.


 con Video Stream en vivo!!")
")


")



")


