La configuración del hardware para una exhibición de PoV es bastante sencilla, pero este instructable contiene código en la pantalla puede ser controlada y programada fácilmente sobre la conexión en serie, y puede guardar configuración de la pantalla para que automáticamente se carga y ejecutar cuando se enciende de una batería.
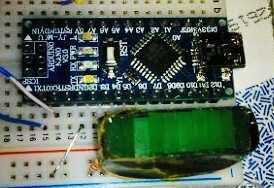
Tendrá una placa de Microcontrolador AVR Arduino, como un Uno, Nano, mini. Alrededor de 10 LED y 10 resistencias de alrededor de 100 a 220 ohms.
Para nuestro ejemplo, se asume que una pantalla LED de 10. Cable del LED en serie con una resistencia a los pines de I/O digitales 3-10 y póngalos en una fila recta.
Cargar el dibujo adjunto.
Desde el serial monitor (o emulador de terminal), tipo h para obtener el menú de ayuda. Esto le mostrará varios comandos.
Mi clase de lector Serial comprime espacios en blanco, por lo que se desea utilizar. representar a "off" en la configuración de la línea. Vea el adjunto Quelab.dat muestra línea configuración archivo de entrada. Las líneas de este archivo se pueden cortar y pegar en un emulador de terminal para configurar el mensaje de PoV.
Una vez se haya cargado la pantalla deseada, utilice el s) comando para guardar la configuración en EEPROM para ser utilizado en el próximo reinicio.
int dummy=0; // this is to force sketch to put arduino include here #define MODE_UNKNOWN 0 #define MODE_PoV 1 #define MODE_RANDOM 2 #define MODE_CYLON 3 #define MAX_COLS 96 #define SERIAL_BUF_LEN (MAX_COLS+15) #include SerialLineBuffer LineBuf; struct { short nCols; // no. columns in buffer short spaceCols; // no. columns "space" time before repeat or reverse short mode; // MODE_ code from above short cylonCols; // no. cols of time for each cylon flash int colTime; // milliseconds/column int misc[3]; // reserved for future use short disp[MAX_COLS]; // display flags } State; // These are the DI/O pins used for the display #define NPINS 10 int ledPins[NPINS] = {12,11,10,9,8,7,6,5,4,3}; #include void loadState() { int n = sizeof(State); byte *bp = (byte *)(&State); for(int i=0; i < n; i++, bp++) *bp = EEPROM.read(i); if (!validState()) initState(); } void saveState() { int n = sizeof(State); byte *bp = (byte *)(&State); for(int i=0; i < n; i++, bp++) EEPROM.write(i,*bp); } // set state to a reasonable default void initState() { State.nCols = 2; State.spaceCols = 1; State.cylonCols = 10; State.mode = MODE_PoV; State.colTime = 10; // ms for (int i=0; i < MAX_COLS; i++) State.disp[i] = (i&1)?0x5555:0x2aaa; saveState(); } void setup() { int i; for (i=0;i { pinMode(ledPins[i],OUTPUT); } pinMode(13,OUTPUT); // use on-board LED // restore state from EEPROM loadState(); Serial.begin(9600); } void loop() { checkCommand(); int i,dt,k; dt = State.colTime; switch (State.mode) { case MODE_CYLON: dt *= State.cylonCols; for (i=0; i < NPINS; i++) { digitalWrite(ledPins[i],HIGH); delay(dt); digitalWrite(ledPins[(i+NPINS-1)%NPINS],LOW); delay(dt); } for (i=NPINS-2; i >= 0; i--) { digitalWrite(ledPins[i],HIGH); delay(dt); digitalWrite(ledPins[(i+1)%NPINS],LOW); delay(dt); } break; case MODE_PoV: for (i=0; i < State.nCols; i++) { short mask=1; for (k=0; k < NPINS; k++, mask <<= 1) digitalWrite(ledPins[k],(mask & State.disp[i])?HIGH:LOW); } for (k=0; k < NPINS; k++) digitalWrite(ledPins[k],LOW); delay(State.spaceCols*dt); break; default: // random default { dt *= 10; k = random(100); int lvl = (k<50)?LOW:HIGH; int j = random(NPINS); digitalWrite(ledPins[j],lvl); delay(dt); } } digitalWrite(13,digitalRead(13)?LOW:HIGH); // toggle heartbeat } // poll for commands from serial port void checkCommand() { short mask; if (!LineBuf.isComplete()) return; char key = lowCase(*(LineBuf.get())); switch(key) { //short mask; //int k; //char *b; case 'h' : Serial.println(" h) help (print this message)"); Serial.println(" s) save state"); Serial.println(" r) random lights mode"); Serial.println(" c) cylon mode"); Serial.println(" p) PoV sign mode"); Serial.println(" n) no. cols to display"); Serial.println(" t) col time, ms"); Serial.println(" b) blank cols between repeat"); Serial.println(" i) re-Initialize state"); Serial.print( " Lx) Set pattern for line x, 0<=x<="); Serial.println(NPINS); break; case 's' : saveState(); break; case 'r' : State.mode = MODE_RANDOM; break; case 'p' : State.mode = MODE_PoV; break; case 'c' : State.mode = MODE_CYLON; break; case 'i' : initState(); break; case 'n' : State.nCols =nextInt(LineBuf.get()+1); break; case 't' : State.colTime =nextInt(LineBuf.get()+1); break; case 'b' : State.spaceCols=nextInt(LineBuf.get()+1); break; case 'l' : { char *b = LineBuf.get()+1; int k = ((int)(*b)) - ((int)'0'); if ((k<0) || (k > 15)) break; b++; short mask = (short)(1< for (int i=0; i < State.nCols; i++, b++) { if (isOn(*b)) State.disp[i] |= mask; else State.disp[i] &= ~mask; } break; } default : Serial.print("Unrecognized Command : <"); Serial.print(LineBuf.get()); Serial.println(">"); Serial.println("Send command h for help."); } printState(); printMsg(); } void printState() { Serial.print(State.nCols); Serial.print(" Columns "); Serial.print(State.spaceCols); Serial.print(" "); Serial.print(State.colTime); Serial.println("ms/col"); Serial.flush(); } void printMsg() { int i,k; Serial.println(); for (i=0; i < State.nCols; i++) Serial.print("-"); short mask=1; for(k=0; k < NPINS; k++, mask <= 1) { for (i=0; i < State.nCols; i++) Serial.print(State.disp[k]&mask?"X":" "); Serial.println("|"); } Serial.println(); for (i=0; i < State.nCols; i++) Serial.print("-"); Serial.println(); Serial.flush(); } // parse next int from a string int nextInt(const char *s) { const char *c = s; int val = 0; for(;;) { int k = ((int)(*c)) - ((int)'0'); if ((k<0)||(k>9)) return val; val *= 10; val += k; c++; } } bool isOn(const char c) { if ((c=='0') || (c=='.') || (c==' ') || (c==0)) return false; //if ((c=='1')||(lowCase(c)=='x')) return true; return true; } bool validState() { // check for silly state, set to default if inconsistent if ((State.mode <= 0) || (State.mode > 3) || (State.nCols< 1) || (State.nCols>MAX_COLS)) return false; if ((State.spaceCols < 1) || (State.spaceCols > 10*MAX_COLS)) return false; if ((State.colTime < 1) || (State.colTime > 10000)) return false; if ((State.cylonCols < 1) || (State.cylonCols > 10000)) return false; return true; } ---ioUtil.h
class SerialLineBufferPrivates; class SerialLineBuffer { public: SerialLineBuffer(); //~SerialLineBuffer(); bool isComplete(); // reads from serial, return true if 0 or EOLN void clear(); void begin(); int length() const; int maxLength() const; char *get(); // retrieve current buffer and clear char buf[SERIAL_BUF_LEN+1]; protected: int _maxLength, _len; bool _complete; private: //class SerialLineBufferPrivates *Priv; }; char lowCase(const char a); int caseCmp(const char a0, const char b0); char *extractKey(char *cmdStr, char **val); bool keyMatch(const char *key, const char *key1); ---ioUtil.cpp
#include #define NULL 0 // don't want to depend on ctype.h, just for this! bool isBlank(int c) { if(c == 7) return(false); // bell return( (c <= ' ') || (c > '~') ); } #if defined(ARDUINO) && ARDUINO >= 100 #include #warning ARDUINO #else #error ARDUINO not >= 100 #include #endif void SerialLineBuffer::begin() { _maxLength = SERIAL_BUF_LEN; // AVR dynamic mem is tricky _len = 0; _complete = false; } SerialLineBuffer::SerialLineBuffer() { begin(); } bool isTerminator(int c) { if (c == 0) return(true); if (c == ';') return(true); // sending \n to serial is tricky. accept this too. //if ((c=='\n') || (c=='\r') || (c=='\m')) return(true); if ((c>=10) && (c<=13)) return(true); // \r, \n, form feed, vert tab return(false); } /// read from serial, return true if 0 or EOLN bool SerialLineBuffer::isComplete() { if (_complete) return(true); // don't read more until this line is consumed // add characters from serial while(Serial.available() > 0) { int nextByte = Serial.read(); //Serial.print("Got ");Serial.println(nextByte); if ((nextByte < 0) || (nextByte >= 256)) return(_complete); if (isTerminator(nextByte)) { //Serial.print("terminator ");Serial.println(nextByte); buf[_len] = 0; _complete = (_len > 0); return(_complete); } if (isBlank(nextByte)) { //Serial.print("blank ");Serial.println(nextByte); if (_len > 0) // ignore leading whitespace { if (buf[_len-1] != ' ') // compact space to 1 space { buf[_len++] = ' '; // convert all space to ' ' } } } else { buf[_len++] = (char)nextByte; } // don't allow overflow if (_len >= _maxLength) { Serial.println("\nOverflow. truncating command string"); _complete = true; } } return(_complete); } void SerialLineBuffer::clear() { _len = 0; _complete = false; } int SerialLineBuffer::length() const { return(_len); } int SerialLineBuffer::maxLength() const { return(_maxLength); } /// retrieve current buffer and clear char *SerialLineBuffer::get() { buf[_len]=0; clear(); return(buf); } //----------------------------------------------------------- /// split a keyword-value pair string into a key string and value string const char nullChar = 0; // static is scary on AVR char *extractKey(char *cmdStr, char **val) { *val = (char *)&nullChar; if (cmdStr == NULL) return(NULL); char *key = cmdStr; while (*key) // process comments { if (*key == '#') *key=0; // comment else key++; } key = cmdStr; while(*key && isBlank(*key)) key++; // trim leading space *val = key; while(**val && !isBlank(**val)) *val += 1; // skip key **val = 0; *val += 1; while(**val && isBlank(**val)) *val += 1; // skip whitespace return(key); } char lowCase(const char a) { if ((a >= 'A') && (a <= 'Z')) { int sft = ((int)'a') - ((int)'A'); int b = (int)a + sft; return((char)b); } return(a); } int caseCmp(const char a0, const char b0) { char a = lowCase(a0); char b = lowCase(b0); if (a < b) return(-1); return((a>b)?1:0); } bool keyMatch(const char *key0, const char *key1) { //Serial.print("keyMatch(");Serial.print(key0);Serial.print(",");Serial.print(key1);Serial.print(")="); while(*key0 || *key1) { if (caseCmp(*key0, *key1)) { //Serial.println("false"); return(false); } if (*key0) key0++; if (*key1) key1++; } //Serial.println("true"); return(true); } ---Ejemplo entrada de datos
L0..Q.............l......b.... L1.QQQ............l......b.... L2Q...Q...........l......b.... L3Q...Q.u..u..ee..l..a.a.b.b.. L4Q...Q.u..u.e..e.l.a.aa.bb.b. L5Q...Q.u..u.e..e.l.a..a.b..b. L6Q.Q.Q.u..u.eeee.l.a..a.b..b. L7Q..Q..u..u.e....l.a..a.b..b. L8.Q.Q..u..u.e..e.l.a.aa.bb.b. L9.QQ.Q..uu...ee..l..a.a.b.b..













