Paso 4: PID FrontEnd GUI
En esta ventana, podemos destacar las siguientes funciones:
TOGGLE_AM - cambia el modo PID automático o manual;
Punto de ajuste - cantidad deseada de la luz en el medio ambiente (del 0 al 1024);
Entrada - el valor real de la luminosidad del entorno (medido por el LDR y volvió como feedback);
Salida - el control de valor devuelto por el Arduino como un controlador PID (control de brillo del LED conectado en el pin D3);
Kp - constante del control proporcional;
Ki - constante del control Integral;
Kd - constante del control derivativo;
TOOGLE_DR - cambia la dirección de la PID (si la producción crece a medida que crece la entrada o a la inversa de la misma);
SEND_TO_ARDUINO - enviar datos a la Arduino;
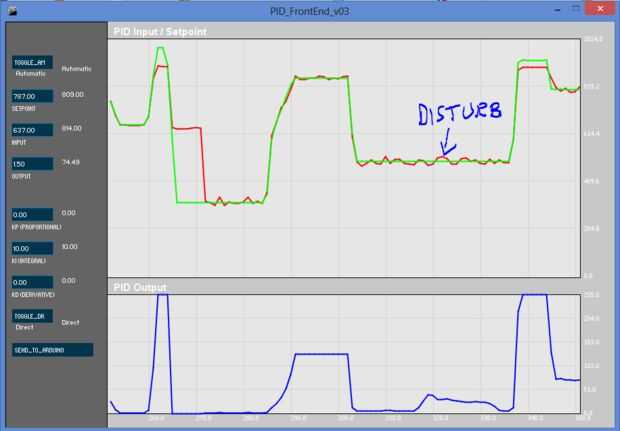
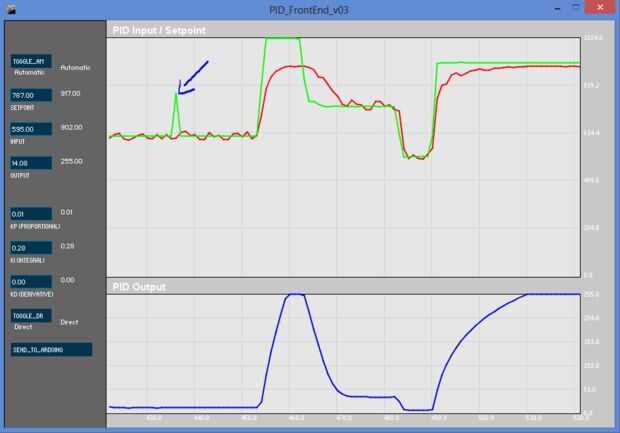
PID entrada / punto de ajuste -ventana gráfica de las curvas de entrada (medida de luminosidad LDR) y valor de consigna (valor deseado para el brillo).
Salida del PID - ventana gráfica para la salida de control del LED.
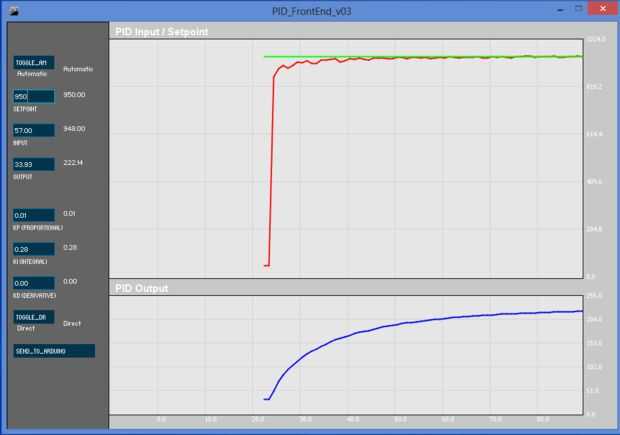
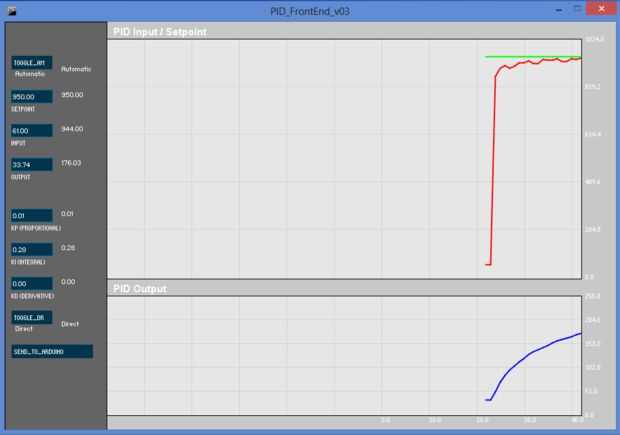
En las imágenes, podemos notar el punto de referencia colocado a 950 (línea verde), la variable de entrada (línea roja) y el PID de control de variable de salida (línea azul) al control de brillo.
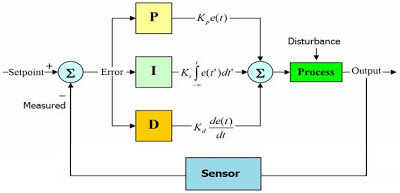
Podemos entender la información descrita Fahrzeugteile a través de un diagrama de bloques (mirar las fotos).
Donde observamos que el Error = SP - PV y el error se aplica al controlador PID que genera el MV para control de proceso.
PV = Variable de proceso;
SP = punto de ajuste;
MV = Variable manipulada.
Cada tipo de controlador: P, I y D puede ser utilizado independientemente o conjuntamente como:
Controlador P (muy utilizado)
Controlador PI (muy utilizado)
Controlador PD (rara vez utilizada)
Regulador PID (más usado)
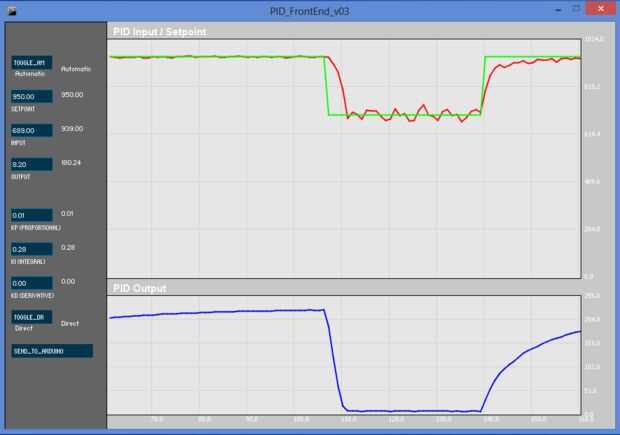
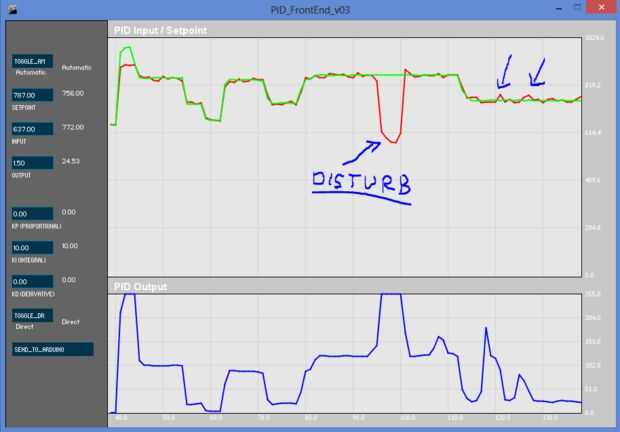
Mira las fotos y se puede observar un cambio en el valor de ajuste (desde 950 a 700 y luego a 950 otra vez) y se puede ver el funcionamiento del control de PID en la variable de entrada.
Se puede observar que tiene un poco de oscilación en el control (característico de cada sistema controlado, ya sea primer o segunda orden, etc..).



")
")








