Paso 4: Resumen
En la segunda versión he añadido:
- Interruptor de doble polo doble tiro para que podemos activar o desactivar ambos fuente de alimentación (3.7V alimentación de Arduino y XBee/Bluetooth y 6-9V fuente de alimentación para el motor) en un solo interruptor.
- 1 x dos 3 puentes fueron agregados por lo que podríamos utilizar pin D2 y D3 como opción de serie de Software para XBee o Bluetooth, en lugar de utilizar pin D0 y D1 como la serie RX/TX para XBee o Bluetooth.
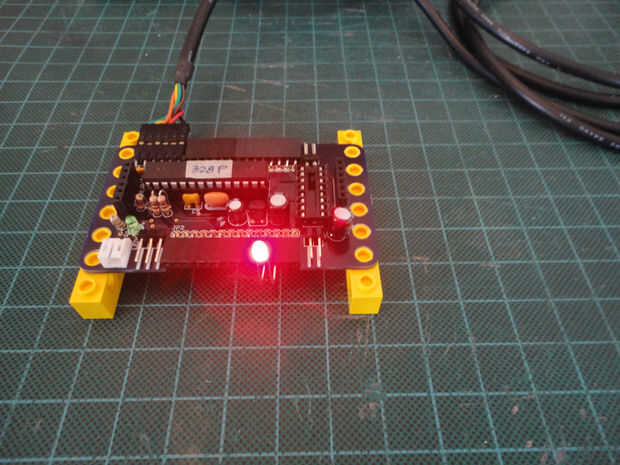
- El LED de depuración (pin D13 LED) con resistencia agregaron podríamos utilizar para probar el bosquejo.
Estos recomendados pueden verse en esta foto del proyecto y en el video de intro.
Recursos Foto 1
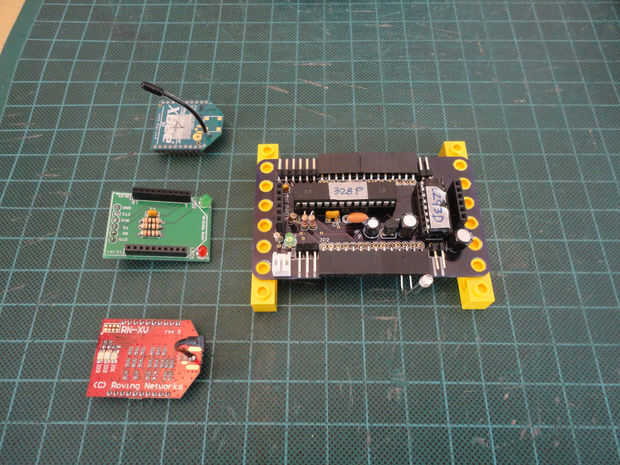
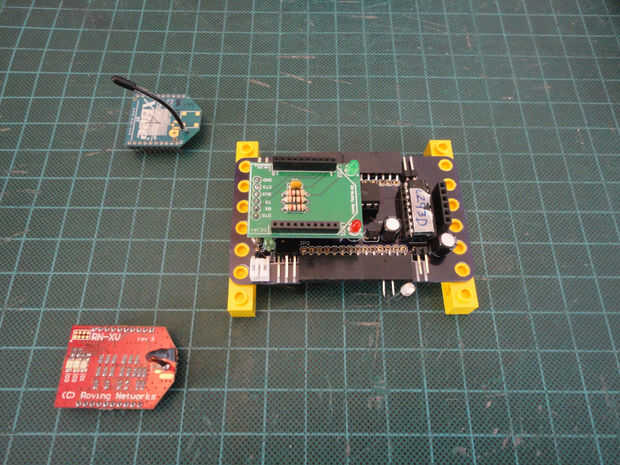
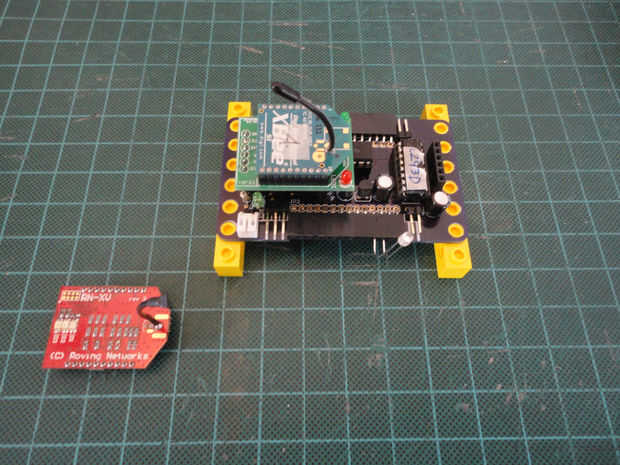
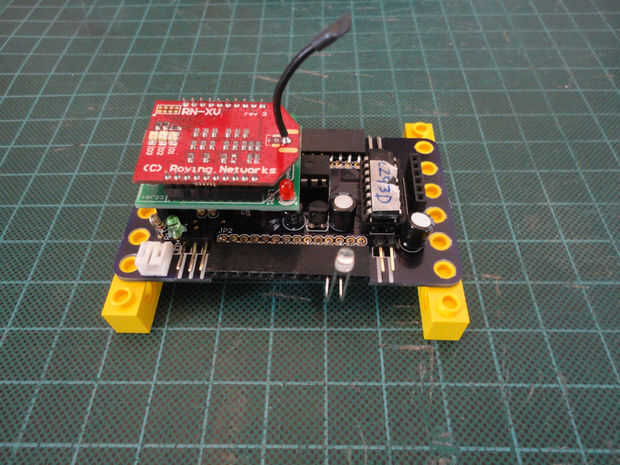
Foto 2, 3, 4, 5 Mostrar la opción de instalación del módulo XBee y módulo RX-XV WiFly con el XBee Buddy Breakout Junta.
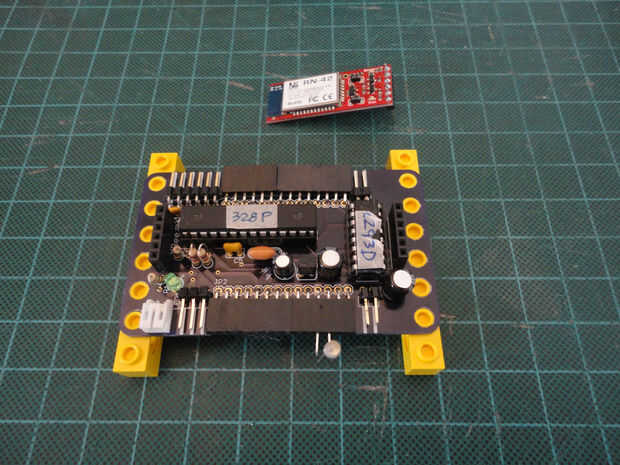
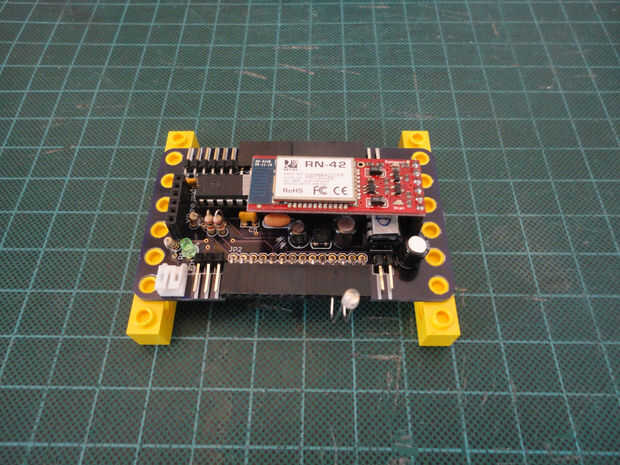
Foto 6, 7 Mostrar la opción de instalación de Bluetooth breakout Junta (RN-4 x Bluetooth de Sparkfun Junta, usé Bluetooth Mate plata, WRL-10393 como ejemplo)
Bocetos de prueba
Los siguientes son los videos de la prueba de la palma Arduino además de sus características.
Nota: para el uso de Bluetooth, por favor mire el Wireless LEGO® carrera coche Redux (estoy trabajando en ello. ¡ Próximamente!)
Servo
He asignado pin Digital 5 en Palm Arduino Plus para conectar al pin de salida del servo.
Lo que sigue es el sketch de Arduino que usé para probar el conector de servo en Arduino de Palma.
#include < Servo.h > #define ServoPin 5 #define LED 13 Servo servo; ángulo de int = 0; void calibrateServo() {servo.write(90); delay(15);} void setup() {pinMode (LED, salida); digitalWrite (LED, baja); servo.attach(ServoPin); / / este se realiza una vez / / delay(1000), calibrateServo(); digitalWrite (LED, alta); digitalWrite (LED, LOW);} void loop() {digitalWrite (LED, alta); para (ángulo = 30; ángulo < 135; ángulo ++) {servo.write(angle); delay(20);} digitalWrite (LED, baja); para (ángulo = 135; ángulo > 30; ángulo--) {servo.write(angle); delay(20);}}
Motor
La asignación de pines en Palm Arduino Plus para el pin de salida del motor de controlador de motor L293D son pin digital 9, 8 y 7.
Lo que sigue es el sketch de Arduino que usé para las pruebas de los conectores del motor entre Palma Arduino y el controlador de motor L293D.
Motores de prueba / / Motor #1 int Motor01Enable = 9; int Motor01Pin1 = 8; int Motor01Pin2 = 7; LED encendido y apagado acción int LEDs = 13; void setup() {pinMode (Lamparas, salida); / / Motor #1 pinMode (Motor01Enable, salida); pinMode (Motor01Pin1, salida); pinMode (Motor01Pin2, salida);} void loop() {digitalWrite (LEDs, HIGH); digitalWrite (Lamparas, baja), delay(500); delay(500); / / girar derecha para 1500 milisegundos motor01DirA(); delay(1500); / / pausa para 1000 milisegundos motor01Pause(1000); / / gire a la izquierda para 15000 milisegundos motor01DirB(); delay(1000); motor01Pause(1000);} void motor01DirA() {digitalWrite (Motor01Enable, alto); digitalWrite (Motor01Pin1, LOW); digitalWrite (Motor01Pin2 ALTO); } void motor01DirB() {digitalWrite (Motor01Enable, alto); digitalWrite (Motor01Pin2, LOW); digitalWrite (Motor01Pin1, alto);} void motor01Pause(int mSec) {digitalWrite (Motor01Enable, LOW); digitalWrite (Motor01Pin2, LOW); digitalWrite (Motor01Pin1, LOW); delay(mSec);}
Videos
-Prueba de parpadeo LED
- Prueba de Servo (la palma Arduino Plus fue instalado en Wireless LEGO Race Car).
- El Motor de prueba (la palma Arduino Plus fue instalado en Wireless LEGO Race Car).













