Paso 5: Montaje del Motor y engranajes



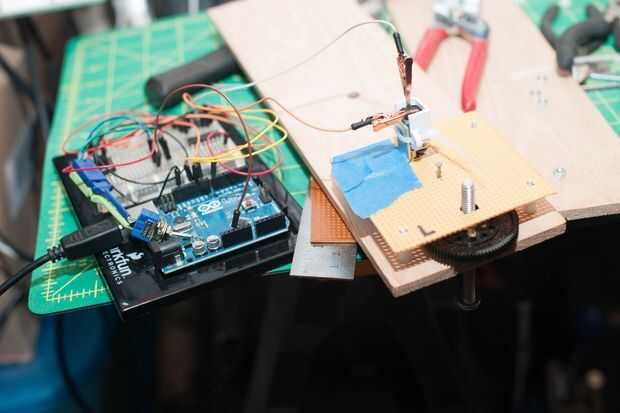
Pegar primero una tuerca de 1/4-20 estándar a uno de los engranajes, esta va a ser el engranaje de impulsión principal de reloj, que utiliza una cantidad generosa de pegamento del gorila para esto (se puede ver en la foto).
Segundo pegar una pequeña marcha a otro equipo grande, este es nuestro equipo intermedio, usé un simple cortar clavo de madera como el eje.
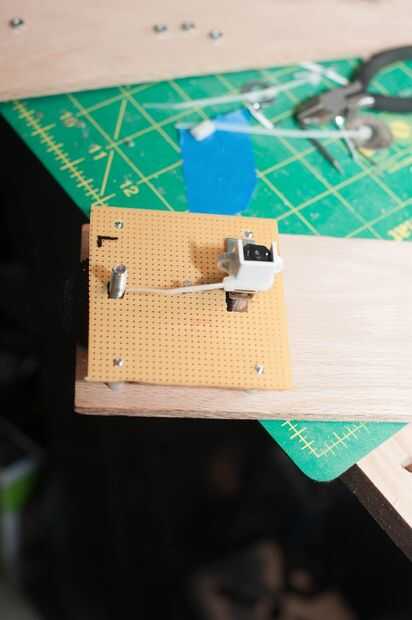
Montar el motor a un soporte (zip ató y luego pegado más tarde cuando tuve la alineación derecha).
La configuración es que el motor gire el engranaje grande a un ritmo relativamente rápido (1 rev / 5 segundos o menos), esto está conectado con el engranaje pequeño, que viaja a la misma velocidad. El engranaje pequeño alineado con el engranaje de impulsión principal de reloj pero puesto que las circunferencias son diferentes el engranaje de la rueda de reloj se convierte en una tasa mucho más lenta. Estamos apuntando para una velocidad de 1 rpm y el motor viaja un poco demasiado rápido para. Así mediante el uso de un encendido y apagado en el código de Arduino he conseguido ralentizar la marcha. Esta configuración se denomina un tren de engranajes y usted puede aprender un poco más sobre él aquí (http://science.howstuffworks.com/transport/engines-equipment/gear-ratio3.htm) vas a tener que experimentar con lo que funcionan para valores dentro y fuera de tiempo para hacer el engranaje girar a la velocidad correcta para su motor y engranajes.
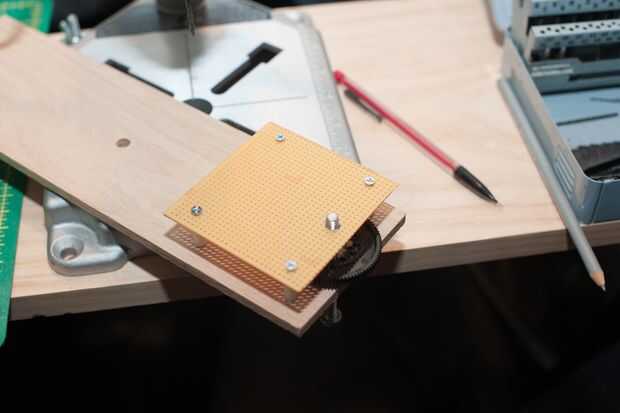
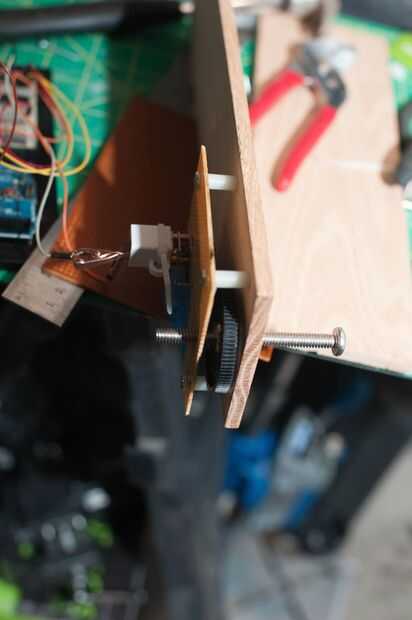
Necesita una buena cubierta para mantener todo alineado y girar suavemente. Tenga cuidado de alinear los agujeros y usar resortes y arandelas para mantener los engranajes por superficies lisas y no pulido contra cualquier tablero. Esto probablemente me tomó más tiempo en el proyecto.













")