Paso 9: Motor y variador

La velocidad del vehículo se controla a través de la modulación de onda de pulso (PWM) proporcionado por el protector de Motor de Adafruit. Básicamente nos permite aplicar energía parcial del motor DC (es decir, correr en un 25%, 50%, 75%, 100%, etc.). Para fines prácticos, el motor necesita unos 20% energía simplemente para tener suficiente par para vencer la resistencia y del balanceo; y demasiado rápido de velocidades el vehículo difícil de controlar. Definimos una serie de velocidades como #define declaraciones en el programa, como SPEED_SLOW, SPEED_FAST, SPEED_NORMAL, SPEED_TURN, etc..
La lógica del programa define la velocidad basada en la lógica siguiente:
- Si el vehículo va recto (no gira) y no objetos son detectados, ir rápido
- Si el vehículo va recto y detecta un objeto, frenar
- Si el vehículo gira (para evitar y objetos o para interceptar un rumbo de navegación), frenar a los "gire a la velocidad"
El mecanismo de dirección tiene un resorte que mantiene la dirección en la posición central cuando no se aplica energía al volante motor; Esto limita la dirección a la extrema izquierda o derecha dura; Dirección proporcional no es posible.
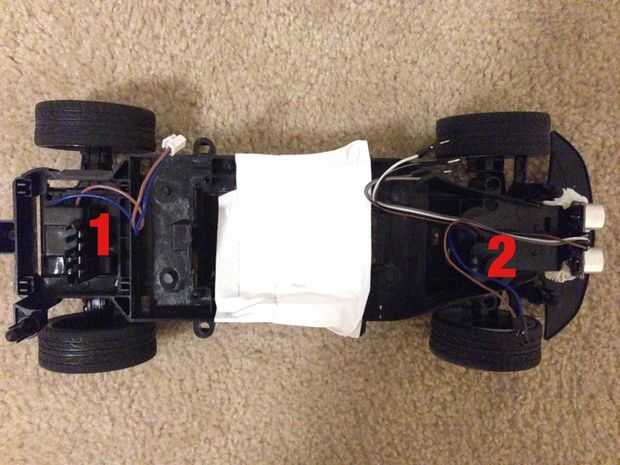
En la foto de arriba, puede ver (1) el motor de accionamiento de la rueda trasera y (2) el manejo motor de rueda delantera.







")

 utilizando un Arduino")
 /w Arduino")

")
")