Paso 4: Pantalla de LCD

La pantalla LCD proporciona una perspectiva invaluable lo que el vehículo está haciendo, crítico para la depuración y ajuste el código. También se ve cool!
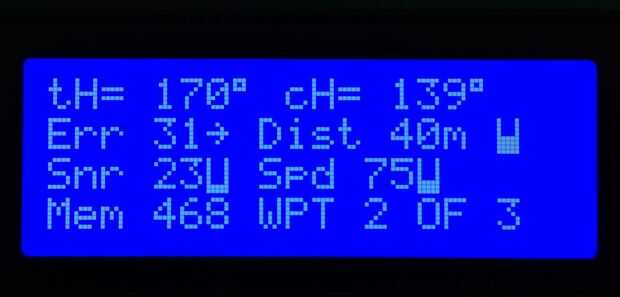
Mientras se ejecuta, la pantalla principal muestra la siguiente información:
Fila 1:
1. tH = hacia el objetivo, el curso en el waypoint actual;
2. cH = rumbo actual, la dirección el vehículo se enfrenta realmente a
Fila 2:
3. error = Error (en grados) entre la dirección de destino y rumbo de la brújula; Este es un valor firmado indicando la dirección (izquierda o derecha) el vehículo necesita interceptar el blanco partida;
4. Dist = distancia (metros) hacia el waypoint actual; Usted notará que el gráfico de barras en línea pequeño mostrando la distancia restante a este waypoint.
Fila 3:
5. Snr = Sonar distancia, es decir, la distancia a objetos delante del vehículo. También tiene un gráfico de barras de línea de 0 a la máxima distancia detectable;
6. Spd = velocidad de vehículo (0-255)
Fila 4:
7. mem = memoria (en bytes) de memoria libre; el Arduino Uno solo tiene 2k tuve que vigilar esto de cerca;
8. WPT de x; muestra donde el vehículo está en la lista de waypoints.







")

 utilizando un Arduino")
 /w Arduino")

")
")