Paso 2: sobre el controlador


El controlador se supone que:
- Leer el estado de las palancas.
- Leer el estado del botón hacia atrás.
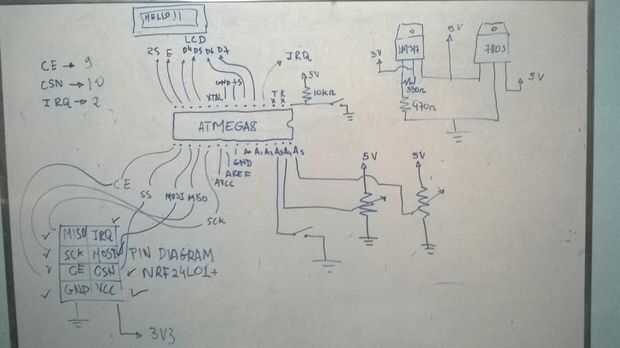
- Mostrar alguna información en la pantalla LCD.
- Tienen un puerto serial para grabar el código y depuración.
- Tienen un puerto fácil gancho el módulo inalámbrico.
- Enviar información al coche a través del módulo inalámbrico.
Las palancas se leen bruja la converter(ADC) digital analógico, sólo quedaba el potenciometro que ya estaba en el controlador. Hay dos palancas, pasadores analógicos tuvieron que ser utilizada.
Como la palanca hacia adelante, que antes era la palanca de altura en el helicóptero, no es el medio (el helicóptero necesita un único canal para controlar su altitud), un botón era necesario contar el coche para volver, cuando se presiona el botón de la palanca está hacia atrás y cuando no se presiona, la palanca está hacia adelante.
Un cable de puerto serial fue agregado al proyecto, a programar el controlador sólo abierto las baterías del caso (no más) y conectan el cable serial a un convertidor de USB-USART, como el 232 de FTDI o el CP2102 y programar con el IDE de Arduino.


")








")

