Paso 4: Configurar Software
Para poder utilizar este brazo, vamos a tener que configurar el software de enlace del brazo. Esto no es difícil, pero participa, así que asegúrese de seguir cuidadosamente.
Descargar los bosquejos de brazo de pargo
- Descargar el pargo brazo bocetos desde Github.
- Descomprimir en la carpeta de bocetos de Arduino. Necesita saber donde es más adelante.
Establecer la biblioteca de vínculos de brazo y Firmware
- Descargar ArmLinkLibrary y extraer la carpeta ArmLink a la carpeta de las bibliotecas de Arduino.
- Abra el IDE de Arduino y
- Quite el comentario de una de las siguientes líneas:
No importa que ya no utilizaremos a una pinza para este proyecto
- Asegúrese de que su Bartender Robot está conectado a su PC vía USB y cargar el firmware.
Configuración de procesamiento
- Descargar y extraer 3 procesamiento para su sistema operativo
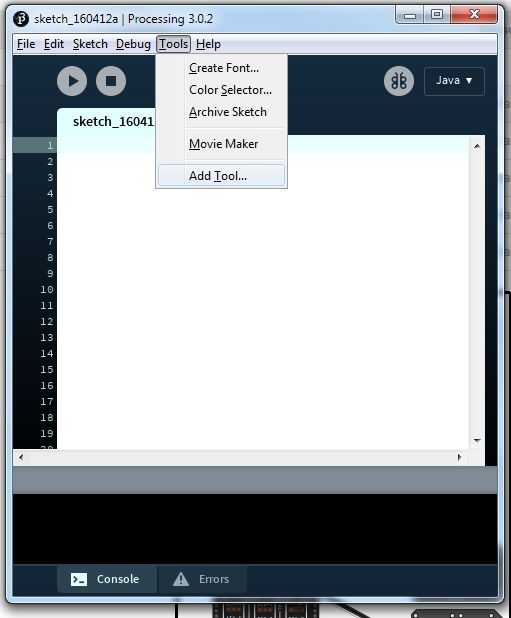
- Abierto
y en la ventana que aparece, haga clic en la pestaña bibliotecas.
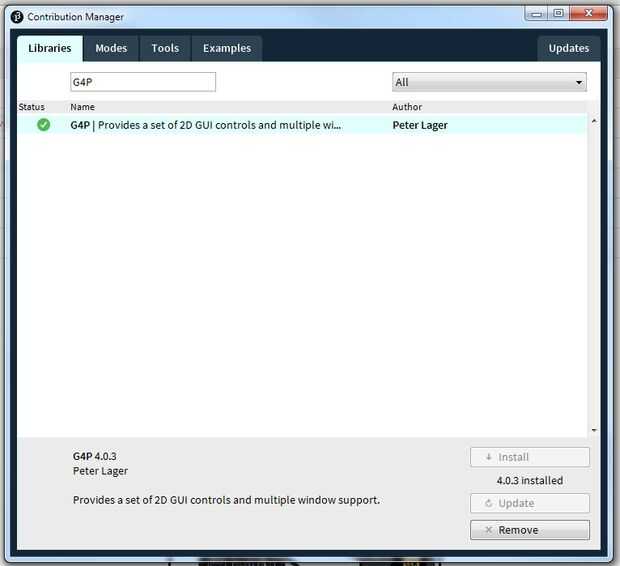
- Buscar en la biblioteca de
G4Py lo instalamos. - Buscar en la biblioteca de
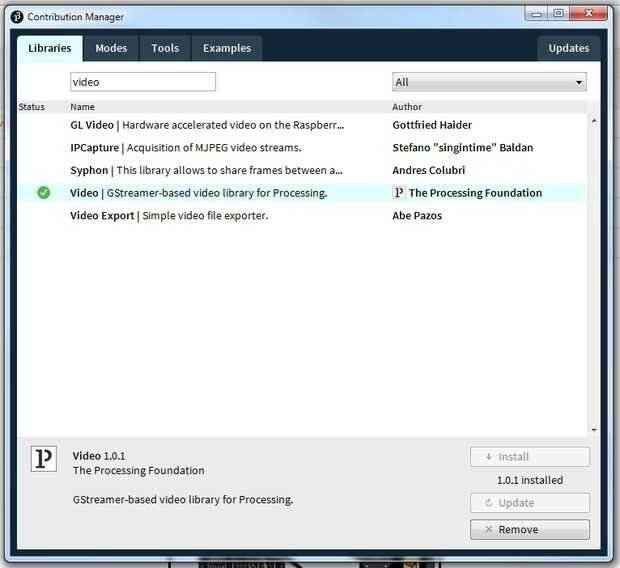
Videoe instalar la biblioteca de vídeo creado por la Fundación de procesamiento
Configuración de enlace de brazo
- Descargar y extraer el ArmLink Software para procesar 3
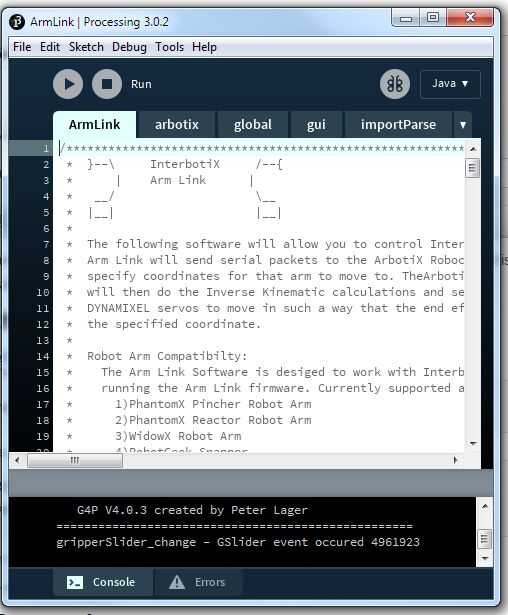
- Asegúrese de que su camarero Robot está conectado a tu PC via USB y abrir
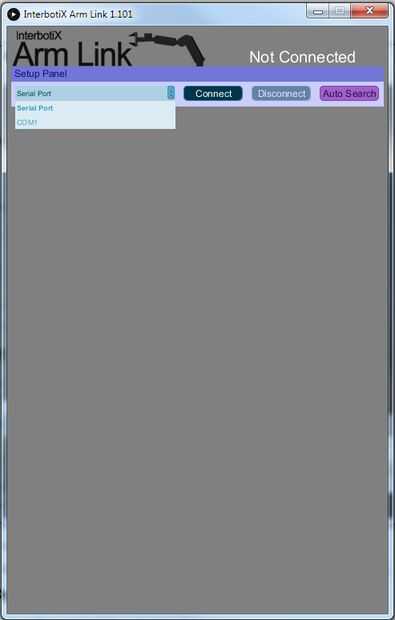
ARMLink.pde. 3 de procesamiento debe abrir una ventana con el código de enlace de brazo InterbotiX. - Presione el botón de triángulo en la esquina superior izquierda de la ventana. Esto ejecutará el Software de enlace del brazo.
- Seleccione el puerto COM en que tu Bartender es y haga clic en conectar.





![BRAZO robótico de la Xbox 360 [ARDUINO]: Axioma brazo](https://foto.askix.com/thumb/170x110/a/73/a73fe094730384e00961d770d1d63f61.jpg "BRAZO robótico de la Xbox 360 [ARDUINO]: Axioma brazo")
 Básicos Arduino Robot buscador de luz!")




