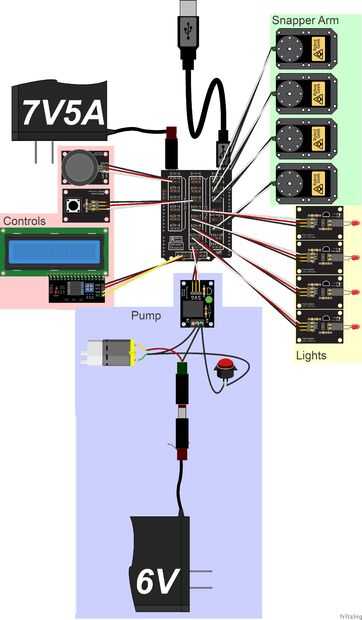
Paso 3: cableado
| Dispositivo de | Puerto del escudo sensor |
|---|---|
| Servos | |
Base de rotación RobotGeek Servo | 3 digital |
Hombro RobotGeek Servo | Digital 5 |
Codo RobotGeek Servo | 6 digital |
Muñeca RobotGeek Servo | 9 digital |
| Salidas | |
Relé RobotGeek Pumping Station | Digital 13 |
LED 1 RobotGeek LED Driver | Digital 4 |
LED 2 RobotGeek LED Driver | Digital 7 |
LED 3 RobotGeek LED Driver | Digital 8 |
LED 4 RobotGeek LED Driver | Digital 12 |
LCD RobotGeek LCD Screen | I2C |
| Entradas | |
Seleccionar palo RobotGeek Joystick (Vertical) | Analógica 0 |
Botón de activación RobotGeek Pushbutton | Digital 2 |
Asegúrese de que la fuente de alimentación de 6V está funcionando la bomba, y la fuente de alimentación de 7V esté enchufada en el Arduino. Los pines de potencia en el protector del Sensor deben establecerse en VIN para alimentación de 7V completo los servos en el brazo de pargo.





![BRAZO robótico de la Xbox 360 [ARDUINO]: Axioma brazo](https://foto.askix.com/thumb/170x110/a/73/a73fe094730384e00961d770d1d63f61.jpg "BRAZO robótico de la Xbox 360 [ARDUINO]: Axioma brazo")
 Básicos Arduino Robot buscador de luz!")




