Paso 5: Ahora la parte fácil...

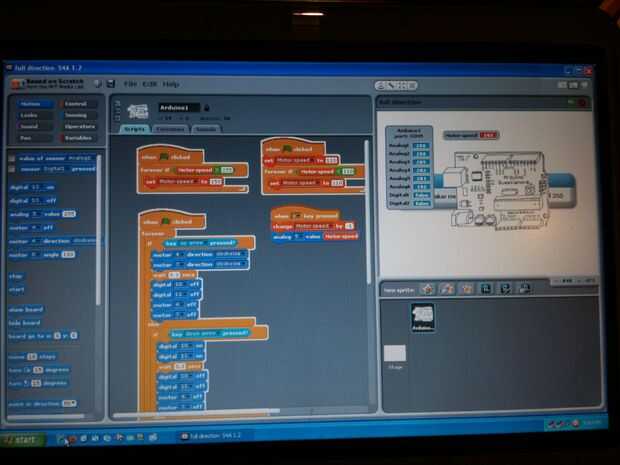
Entonces solía rayar 4 Arduino (S4A) para controlar el robot en modo tethered. Se necesita un parche específico de Citilabs S4A.
He probado un enlace bluetooth que no sirve y entonces traté de Xbee y mi cerebro de challlenged no podía hacer que funcione. Entonces encontré el producto Wixel en chip. Era un pedazo de pastel con su documentación. Me gustaría sugerir el uso de este.
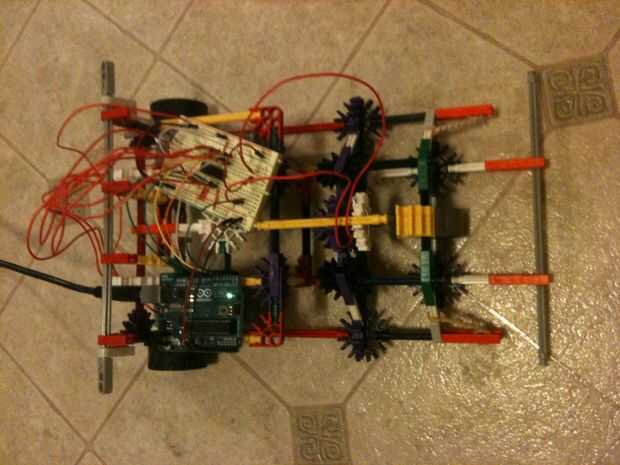
Así que ahora tengo un robot por no mucho dinero que puede ser "creado" por los estudiantes utilizando los bloques de edificio de un kit de K'nex. Entonces puede programar en modo arrastrar y soltar en cero!
Dulce!
¿Gracias para la comprobación de esto... no gano un Makerbot para esto? Sería una parte muy útil de nuestro programa después de clases!
")




 Básicos Arduino Robot buscador de luz!")







