Paso 3: construcción
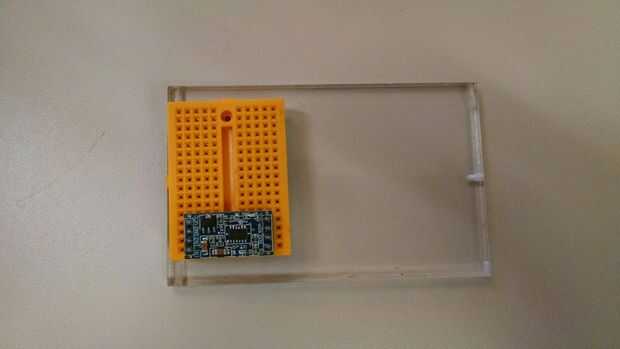
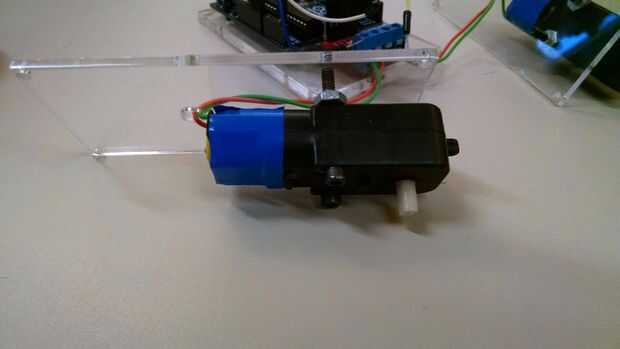
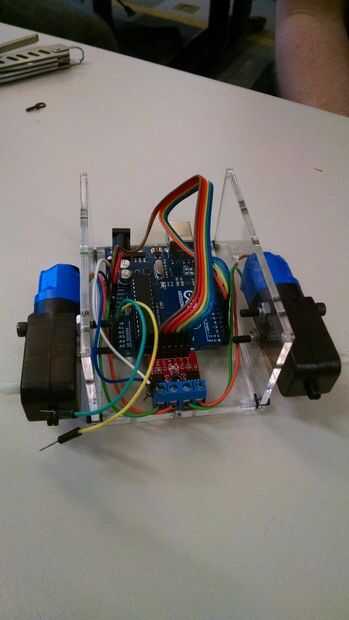
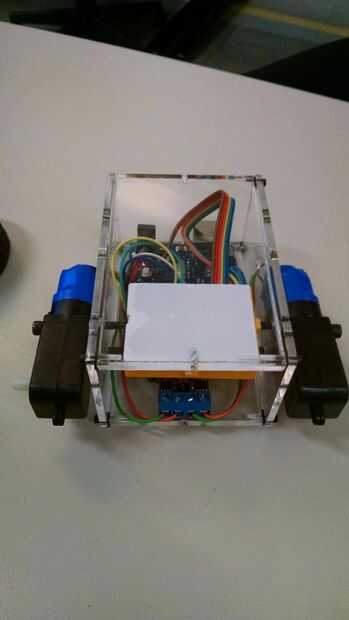
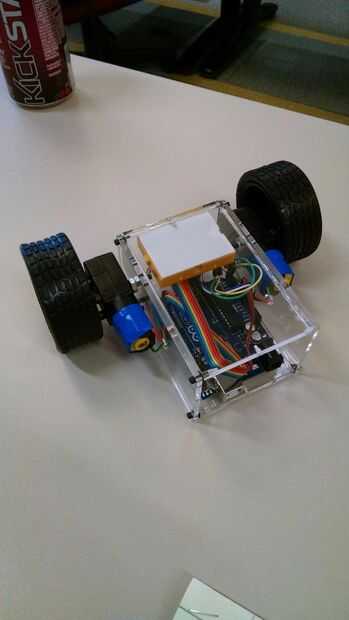
Los agujeros fueron perforados y roscados en los bordes de los lados de acrílico para facilitar el montaje. Un protoboard se fijó en el interior de la placa frontal del robot y el acelerómetro fue unido. Los motores fueron Unidos a las placas laterales con tornillos y tuercas, y el Arduino se fijó en el interior de la placa con tornillos. Las placas laterales fueron Unidas a la placa trasera con los agujeros roscados en el acrílico. La placa fue unida entre las placas laterales de manera similar. Las ruedas se fijan a los ejes de los motores.


 Básicos Arduino Robot buscador de luz!")









