Paso 2: conexiones
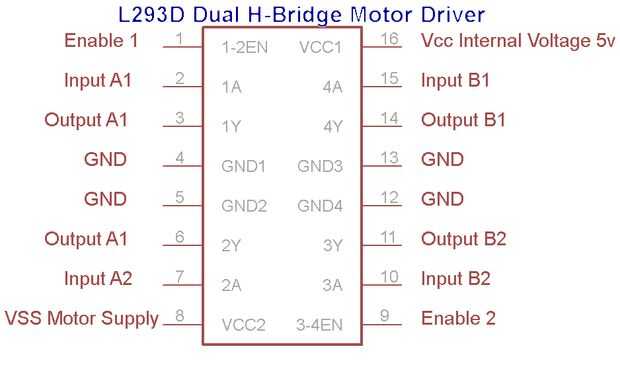

Es esencial entender el uso del controlador de Motor de puente H dual L293D.
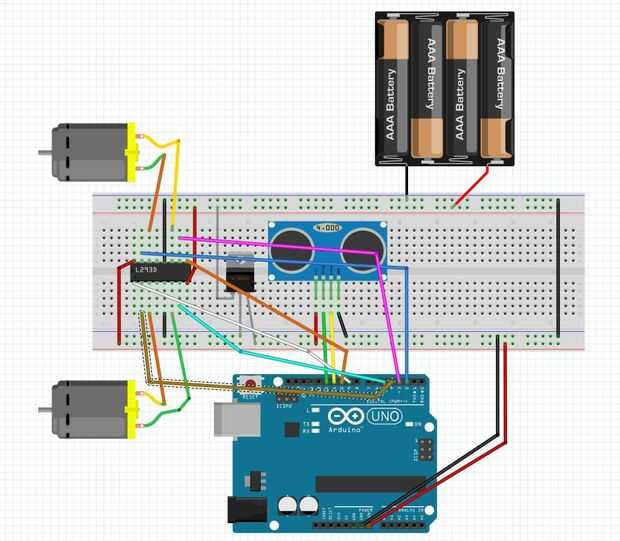
Como se puede ver en la imagen hay conexión para los dos motores (pernos de 3,6 (motor A1) y 11,14 (motor A2) por consiguiente). Así que los motores conectan estos pines y dependiendo del sketch de arduino gire en sentido horario o antihorario. Pero para controlar su velocidad hay que utilizar pin 1 habilitar para el motor A1 y pin 9 activar motor A2 y suministrar con voltajes de los pines de salida analógica arduino. También es una manera de calibrar el movimiento de la robusteza porque los motores no son de la mejor calidad y uno es generalmente más rápido que el otro.
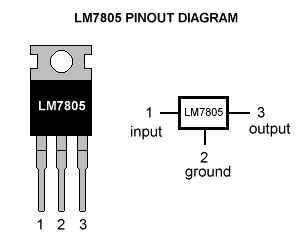
Para la fuente de alimentación si está utilizando una batería de más de 6V tienes que utilizar un regulador de tensión 7805 que le dará una tensión de 5V constante para suministrar el arduino, el L293D y HC-SR04. Como se puede ver en el pin1 esquemático de entrada pin2 en tierra y pin3 es salida de 5V.
Si no estás seguro o teme que podría quemar algo es mejor suministrar el arduino con la pila de 9V normal y dar 5V de arduino a L293D y HC-SR04 y sólo dará suministro de potencia a los motores.
Por favor verifique que L293D se conecta a dos fuentes de alimentación, pin 16 (Vs +) que necesita 5v para el chip y pin 8 (Vss +) que envía energía a los motores y puede controlar más potencia (hasta 24V como usted puede ver en el datasheet aquí). L293D es bastante resistente y no he podido destruir una sin embargo, como con otros aparatos electrónicos sino que es mejor para estudiar las conexiones antes de comenzar a relacionarte con voltajes reales.
Así que antes de conectar cualquier cosa estudiar los esquemas de L293D, HC-SR04, L7805, el diagrama de fritzing y el código del ide de arduino.






 Básicos Arduino Robot buscador de luz!")






