Paso 3: Código de Arduino


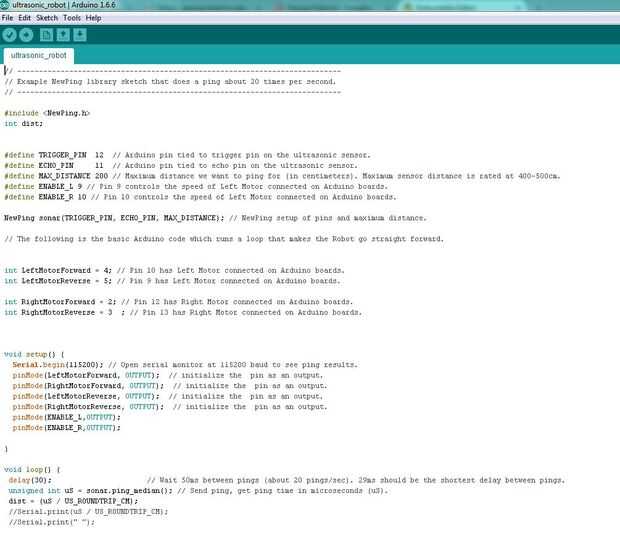
En el archivo de código de arduino incluye hay documentación para cada conexión de pasador.
Se puede ver que dependiendo de la distancia, el robot se mueve rápidamente hacia adelante, adelante, detener, hacia atrás y retroceso. Estoy usando la biblioteca NewPing de la HC-SR04 que es más preciso que mi manual de manejo de HC-SR04.
Puede comprobar la distancia que HC-SR04 medidas utilizando el puerto serie a 115200 baudios. Primero quitar el Vss (pin8 en L293D) cable para que el motor no funciona (y usted no tiene que mantener el robot en el aire)
También hay documentación de calibración de los motores si uno es más rápido que el otro.






 Básicos Arduino Robot buscador de luz!")






