
Dopo aver con de dio il mio primo progetto Arduino: DD-96, è arrivato il momento di presentar il successore: DD-9602.
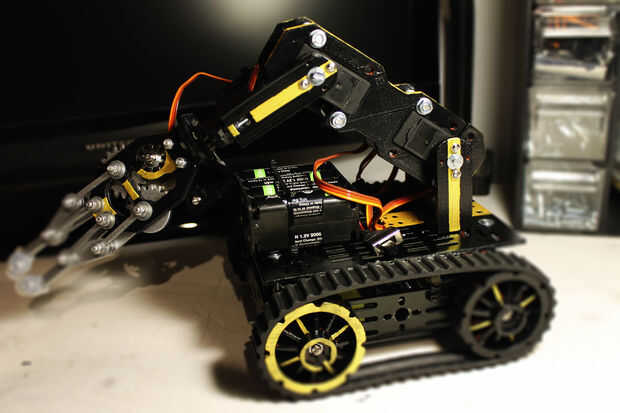
Questo nuovo progetto sta dando vita un manipolatore de las Naciones Unidas ONU robot costituito da (altrimenti detto: braccio meccanico) formato da 4 servomotori e una base móvil avente debido collegati motori DC un due ruote fanno parte di due cingolati.
DD-9602 è controllato una distanza da un radiocomando, principalmente de la OTAN por controllare aeromobili RC, ma con l'ausilio di Arduino è possibile controllare sia me cingoli il braccio robotico con debido e pad debido potenziometri.
La maggior parte degli acquisti è stata fatta sul sito HobbyKing.
Lista della spesa:
· DG012-tanque SV (versión estándar) Kit Multi de chasis con orugas de goma dos.
· 2 x Servo de Robot Digital Turnigy TGY-S902 Metal 13kg/0,14 seg/58 g.
· 2 x Corona CS238MG Metal Gear Servo 4.6 kg / 22 g/0,14 seg.
· Turnigy TGY-i6 AFHDS transmisor y receptor de 6 canales (modo 2).
Altri componenti acquistati su altri siti o altrove:
· Arduino UNO Rev 3
· Shield Arduino Motor
· Pinza por robot en metallo
. Puente
· Batterie
· Dadi, bulloni, barre filettate, viti, ecc.
Procedimento por la costruzione:
1. Disegni digitali en 3D con Blender.
2. Stampa 3D dei componenti.
3. Assemblaggio dello chasis.
4. Assemblaggio del braccio.
5. Unión del brazo con la base.
6. bosquejo.
 Básicos Arduino Robot buscador de luz!")











