Paso 12: Esquema de conexión
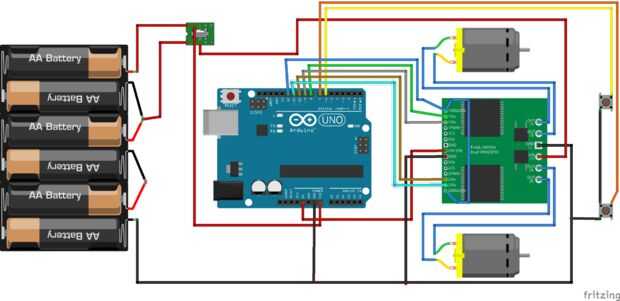
Vamos al alambre para el robot accroding al esquema adjunto.
Cinco salidas de Arduino se utilizan para controlar el motor:
- Conductor del motor de sueño - controles si el conductor del motor está encendido o apagado
- Remite 1 motor
- Motor 1 hacia atrás
- 2 remite motor
- Hacia atrás del motor 2
Hay dos entradas digitales:
- Sensor izquierdo microcswitch
- Sensor microinterruptor derecha
Hay dos fuentes de alimentación - una de 4.5V y de 9V.
(Nota: he utilizado un conductor del motor de Kitronik, en lugar de la poloulou se muestra en el diagrama.)
 Básicos Arduino Robot buscador de luz!")










 :-)")

