Paso 4: programación
/*
* Biblioteca iRremote - Copyright 2009 Ken Shirriff
* creado por Rui Santos, http://randomnerdtutorials.wordpress.com
* Ultrasonido sensor con LED y zumbador
* 2013
*/
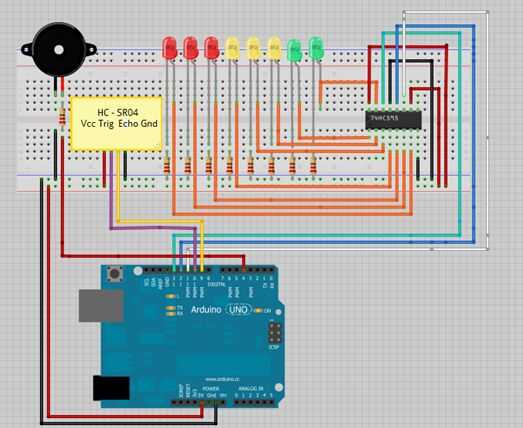
int tonePin = 4; Tono - puente rojo
trigPin int = 9; Trig - puente violeta
echoPin int = 10; Puente eco - amarillo
clockPin int = 11; Pin del IC 11 - puente blanco
int latchPin = 12; Pin del IC 12 - puente azul
int dataPin = 13; Pin del IC 14 - puente verde
byte possible_patterns [9] = {}
B00000000,
B00000001,
B00000011,
B00000111,
B00001111,
B00011111,
B00111111,
B01111111,
B11111111,
};
proximidad de int = 0;
duración del int;
int distancia;
void setup() {}
Puerto serie
Serial.Begin (9600);
pinMode (trigPin, salida);
pinMode (echoPin, entrada);
pinMode (clockPin, salida);
pinMode (latchPin, salida);
pinMode (dataPin, salida);
pinMode (tonePin, salida);
}
void loop() {}
digitalWrite (latchPin, bajo);
digitalWrite (trigPin, HIGH);
delayMicroseconds(1000);
digitalWrite (trigPin, LOW);
duración = pulseIn (echoPin, HIGH);
distancia = (duración/2) / 29,1;
/ * Si (distancia > = 45 || distancia < = 0) {}
Serial.println ("fuera de rango");
}
Else {}
Serial.Print(Distance);
Serial.println ("cm");
}*/
cercanía = mapa (distancia, 45, 8, 0, 0);
Serial.println(Proximity);
Si (proximidad < = 0) {}
cercanía = 0;
}
else if (proximidad > = 3 & & proximidad < = 4) {}
tono (tonePin, 200000, 200);
}
else if (proximidad > = 5 & & proximidad < = 6) {}
tono (tonePin, 5000, 200);
}
else if (proximidad > = 7 & & proximidad < = 8) {}
tono (tonePin, 1000, 200);
}
shiftOut (dataPin, clockPin, MSBFIRST, possible_patterns[proximity]);
digitalWrite (latchPin, HIGH);
Delay(600);
noTone(tonePin);
}













