Paso 3: Arduino Uno + Motor paso a paso

La incapacidad para manipular fácilmente los engranajes, junto con la molestia de la tripa de la pesca, permítanme que para comenzar mi aprendizaje de Arduino. Lo que quería, era un pequeño engranaje de conducción y control de la rotación de ésta con el Arduino. Quiero poder guardar diferentes configuraciones como bocetos diferentes y subir lo que me gustaría. A través de la experimentación más yo sería capaz de crear una colección de configuraciones para diferentes aplicaciones. Sé que algunas de las posibilidades de Arduino, sin embargo entiendo casi inexistente electrónica me ha impedido aprender cuanto antes.
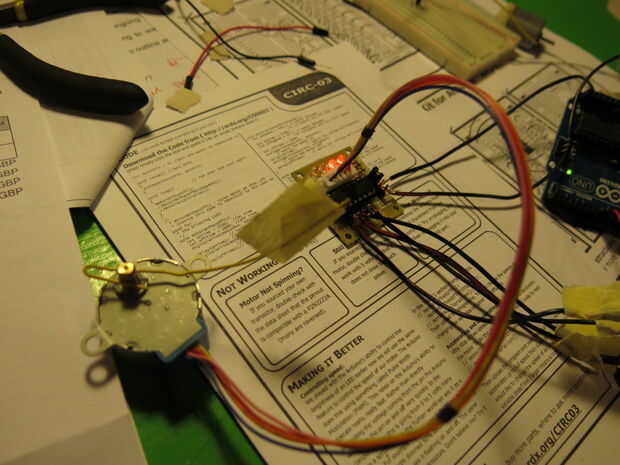
Compré un motor de pasos pequeños y escudo fuera de ebay, y por suerte llegó a Sudáfrica sin mucho molestia (es decir, por suerte no quedar aprisionada en el sistema postal).
Había aprendido lo básico desde el foro de Arduino y utiliza el código motor paso a paso como punto de partida. Puede ver un clip de papel paso a paso del motor, que era capaz de dar un paso hacia adelante y hacia atrás. El código final que terminé usando parecía un poco esto...
/ * Ejemplo de YourDuino.com Software Sketch
Pequeño Motor de pasos y Driver V1.4 30/11/2013 http://arduino-direct.com/sunshop/index.php?l=pro... Una revolución de pasos del eje de salida, vuelva terry *
*---(Importación necesita bibliotecas)---* / #include
/ *---(Declarar constantes, números Pin)---* / / /---(número de pasos por revolución de motor interno en modo de 4 pasos)---#define STEPS_PER_MOTOR_REVOLUTION 32
---(Pasos por eje de reducción del engranaje de salida)---#define STEPS_PER_OUTPUT_REVOLUTION 32 * 1 //2048
/ *---(Declarar objetos)---* / / / crear una instancia de la clase paso a paso, especificando / / el número de pasos del motor y los pernos tiene / / al
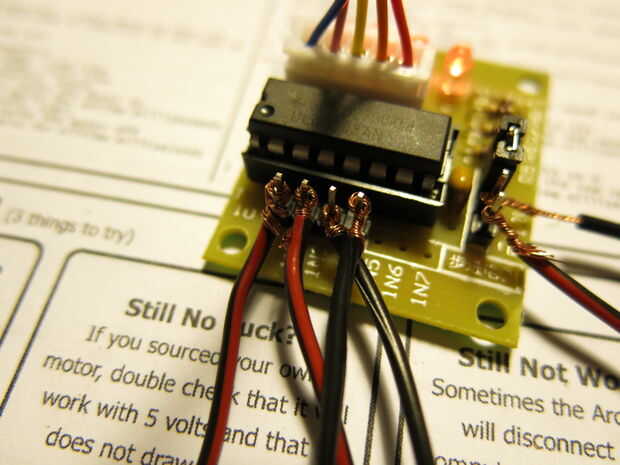
Las conexiones de pasador necesitan ser 4 pines conectados / / a Motor Driver In1, In2, In3, In4 y luego los pernos entrados / / aquí en la secuencia 1-3-2-4 para la secuencia correcta de pasos small_stepper (STEPS_PER_MOTOR_REVOLUTION, 8, 10, 9, 11);
/ *---(Declarar Variables)---* / int Steps2Take;
void setup() / *---(configuración: funciona una vez)---* / {/ / nada (paso a paso biblioteca establece pines como salidas)} / *--(configuración final)---* /
void loop() / *---(bucle: funcionamientos constantemente)---* / {Steps2Take = STEPS_PER_OUTPUT_REVOLUTION; / / girar CW 1 Gire small_stepper.setSpeed(100); small_stepper.step(Steps2Take); delay(2000);} / *--(bucle principal de la final)--*
* (EL FINAL) * /
Manipular los distintos valores para llegar a resultados diferentes. No entiendo muy bien el código, pero funciona. Era capaz de girar la afeitada de unidad una fracción de vuelta; y controlar el tiempo entre estos pequeños pasos. Esto junto con el intervalómetro en la cámara, poder para lograr lo que quería inicialmente. Sé que son capaces de activar la cámara con un Arduino Intervalometer, sin embargo, abordar el control de movimiento es un primer paso conveniente para mí en mis aventuras de Arduino.
Si tienes algún comentario sobre mi código... Sienta por favor libre de dejarme saber lo que piensas, cómo puedo simplificarlo o trate de alternativas.
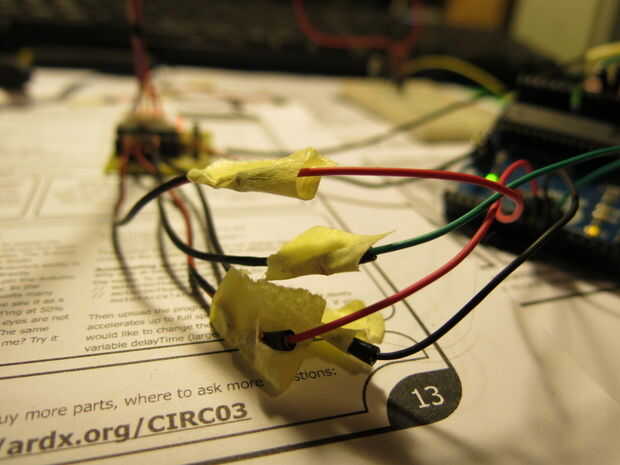
Una vez que el circuito de trabajo, luego fue tiempo para intentar adaptarlo en el resbalador de la cámara y el carril.













