Paso 5: Diagrama de conexiones para este IMU
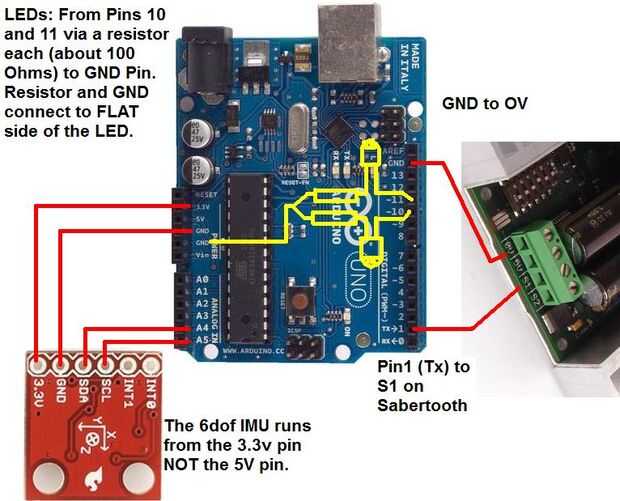
LED no de vital pero bastante útil.
Nota 23.6.15: Una persona esta construcción encontró que la IMU "había encerrado" y dejó de hablar a la Arduino. Él lo solucionó asegurándose de que él utilizó el mismo PIN GND de Arduino para el alambre IMU GND y el alambre de 0V de la Sabertooth. Hay varios pines GND en un Arduino Mega y están conectados entre sí en el tablero, sin embargo se encontró que era más fiable si se utiliza el mismo para todas las conexiones GND de Arduino.
Encienda la máquina con un extremo inclinado hacia abajo en la tierra. Espere que el LED a ambos vienen, mientras presiona el interruptor "Hombre muerto", ahora está listo para que traiga nivel. Cuando la uno mismo-equilibrio de nivel se encenderá y apagado vas ojala.
Si la energía a los motores es > 50% máximo un LED se encenderá mientras lo.
Si la potencia a los motores es > 75% del máximo ambos LED se encenderá mientras que montar a caballo y esto es una advertencia para que usted pueda retrasar un poco.
Si se suelta el interruptor de hombre muerto se cortará toda la energía a los motores después de un retardo de 0,5 segundos (por seguridad).
Lo de la derecha es una dimensión Engineering Sabertooth 2 x 25 Amp motor potencia controlador.
El Arduino envía comandos serie a cada motor rapidez para ir y en qué dirección.
Los lazos del software equilibrio 100 veces por segundo y de esta manera se mantiene nivel.
También hay cables a algunos de los pines digitales en el Arduino y estos no aparecen aquí. Estos son del interruptor de hombre muerto, el interruptor de dirección y el interruptor de eje de balancín que permite fino puesta a punto del punto de equilibrio para cada jinete.
Estas conexiones desde el controlador de mano se enumeran en el paso 17.
")








")



