Paso 2: Código de Python!
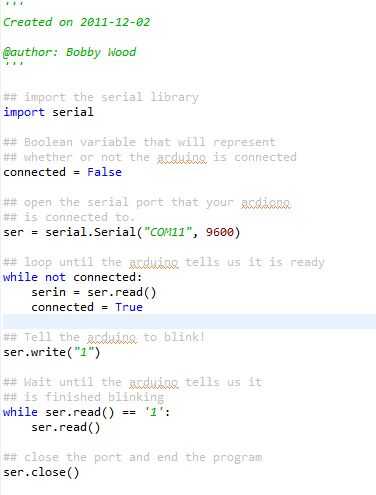
Así que, con el fin de utilizar los métodos PySerial tenemos importar la biblioteca de la serie antes de intentar usarlo.
A continuación se que declaro una variable que actuará como una bandera. Cuando se abren las conexiones serie con el arduino toma un poco de tiempo para arreglar las cosas. Así que no tratamos de enviar nada al arduino hasta que envía algo a nosotros.
Luego inicializamos una variable, serie "ser", que se comunicarán con el arduino. Dos parámetros son enviados al inicializar una variable de serie.
Primero tienes que puerto de que se comunicarán con. En mi caso fue COM11, pero suya puede ser diferente. Para averiguar qué puerto está utilizando el arduino, conectarlo al ordenador y abrir el administrador de dispositivos. El arduino IDE también le dirá qué puerto está utilizando.
El segundo parámetro que se envía es la tasa de baudios. La tasa de baudios es la velocidad que enviar y recibir en el controlador serial, lo importante es que esta tasa de baudios coincide con la tasa de baudios que utilizas en el sketch de arduino. Elegí 9600 ya que es un medio de la velocidad en carretera y no necesita nada demasiado rápido para este ejemplo. Si desea utilizar una velocidad más rápida o más lento, usa Google para averiguar qué velocidad usar.
Queremos decirle a la arduino a parpadear! Así que tengo una función de escritura que envía el número 1 a arduino.
Cuando considera que el arduino va a parpadear dos veces!
Ahora queremos esperar hasta que el arduino nos dice que ha parpadeó dos veces. Por tener el tiempo del programa del lazo a lazo (hacer nada) hasta que reciba un mensaje. Si tuviéramos que dejar esto al mismo tiempo de salida de bucle, el programa iba a cerrar el puerto serie y el arduino dejará de parpadear.
Cuando recibimos el mensaje de arduino podemos cerrar el puerto serie y terminar el programa.
Así es todo lo que necesitamos para el programa de python, a sólo 10 líneas de código!


")
")









