Paso 3: Arduinoで空中浮遊
ここではコイルを指でつまんで磁気浮揚を試します。 本ステップの内容を一読して作業を開始すれば、想像より簡単に浮揚に成功すると思います。
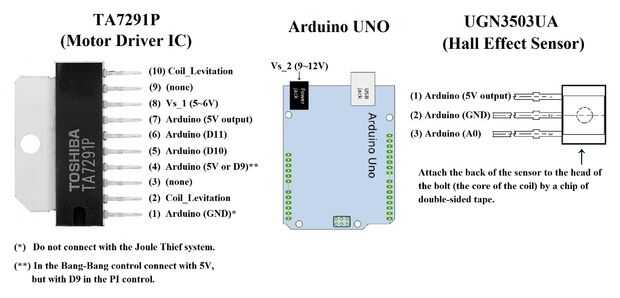
まず前ステップの【浮揚システム】の材料を用意します。 次に浮揚用の電磁石を作ります。 作り方はステップ9を参照してください。 電磁石ができたら、上の図を見ながら部品の配線を行います。 配線が済んだら、本ステップの最後に添付しているサンプル・スケッチ 「levitate_with_BangBang.pdf」の内容をArduinoにアップロードします。
を用意することです。 なお、この試行で最も重要なのは、十分な計測範囲を持つ磁気センサ (ホール効果センサ) の頭に取り付けます。 ここでは、このセンサを電磁石のコア (軟鉄製ボルト) 取り付けは少し厚めの両面テープとセロハン・テープを使います (ステップ9の写真参照). これにより、センサや電磁石の動作不良への対応が容易になります。
下記のVIDEO (2) は、計測範囲が狭いセンサを用いた浮揚実験の様子です。 この実験では、5gを超える物体の浮揚は困難でした。 は、センサを前ステップで紹介したものに代えたものです。 これに対し、その下のVIDEO (3) このセンサを使うと、50g程度の物体も浮揚できます。
VIDEO(2): 計測範囲が狭い磁気センサを使った浮揚の試行
VIDEO(3): 計測範囲が広いセンサに交換した浮揚の試行
下に添付したサンプル・プログラムを見て分かるように、浮揚の制御は至極簡素なものです。 しかしこれで、ネオジム磁石を付けた50g程度の物体を浮揚させることができます。 ネオジム磁石は、2 ~ 4個ほど重ねて使うと浮揚が安定します (電磁石との間隙も広がります). なお、磁石は浮揚時にS極が上向きになるように取り付けてください。
と電磁石の接続は任意ではないので、浮遊が上手くいくように接続して下さい。 また、モータ・ドライバIC (ピン2と10) を少し変えてみてください。 それでも浮揚が安定しない時は、プログラムの中の閾値 (200) 上手く浮揚している間は、電流の向きが高速で変わるため、指に軽い振動が伝わります。








")




")
")