Paso 3: ArduSaw unidad
Los elementos de impulsión necesaria algún pensamiento menor, para lograr un mínimo de 13mm corte utilizando un 58mm hoja hojas sólo 58-(2 x 13) = 32mm para la cubierta del motor ya que esta es una configuración de transmisión directa. Tuve un outrunner repuesto 28mm desde un avión y trató de montado en un tablero de capas usando la cuchilla proxxon. Los resultados fueron bien - muy bien, absolutamente ningún problema de cortar a través de la balsa de 12,7 mm (o mis dedos ya sea :(((). Esto le da una profundidad de corte máxima absoluta de 15mm.
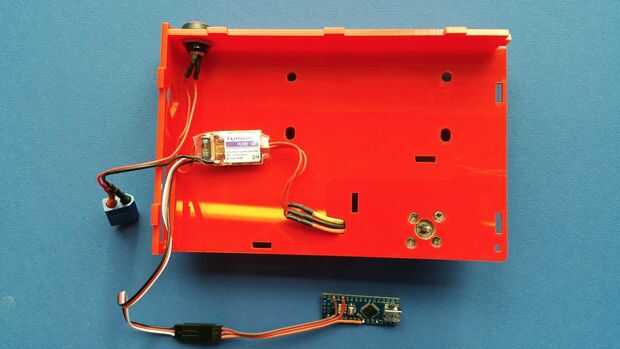
El motor utilizado es un 1350Kv NTM Propdrive 28-26 de HobbyKing (otros motores están disponibles sin duda), tuve una ESC de 55A a mano así que utiliza para la prueba junto con una batería de LiPo 3s/3300mAh y un probador de servos para suministrar una señal de prueba.
La primera cuestión por supuesto iba a ser mi elección de una solución de un botón, la ESC tiene una función de arranque de seguridad construida en. La seguridad requiere la anchura de impulso que por lo menos antes de que se activará el motor - y no puede evitarse (a menos que sepa diferente? - sin reprogramación realmente la ESC es:). Esto significaba que tendría que ser un interruptor más un pote en el probador de servos para enrollarla al día (sólo necesito velocidad máxima). Para evitar este problema, pasé varias semanas escribiendo algunos algoritmos muy complejos para un PWM de control de la señal utilizando un arduino - como si :-) Literalmente tomó 30 minutos para soldar el cable del servo, escribir el código y flash para el arduino - no encanta arduinos :)
El arduino simplemente envía una anchura de impulso mínima para la ESC cuando está encendido, después de 1,5 segundos, envía una anchura de impulso máximo y permanece allí hasta que es apagado - que es todo lo que hace. Había algunos menor faffing acerca de como los pulsewidths debían ser 1 y 2mS respectivamente para la ESC - no los 0 y 180 grados pulsewidths que saca de la biblioteca arduino - los ángulos se ajustan en consecuencia. El pulsador (push para hacer) es simplemente en serie con el positivo de la LiPo. Velocidad de rotación de la lámina es fijada por el voltaje LiPo, motor Kv y por supuesto por cualquier anchura de impulso fuego en la ESC. Suponiendo una anchura de impulso máximo (alrededor de 2 ms), a continuación, utilizando una completamente cargada LiPo de 3S, va a ser alrededor de 4.2 (V) x 3 (células) x 1350 (Kv) = 17 K RPM. KV es efectivamente revoluciones/voltios. Estoy suponiendo mina es alrededor de eso, pero no he de medir (fácilmente :) Puse mi medidor de la carga en serie con la configuración cortando algunos balsa bastante duro 12mm y sólo logró un máximo absoluto de 1.5A! Para ello, la configuración final utiliza un 10A Turnigy Plush ESC de Hobbyking y una LiPo de 3S 1000mAh del mismo lugar :) Me ha pasado a tener estos a mano - cualquier edad ESC hará realmente como es superior a 2A. Necesitará un BEC para el arduino - que es sólo de unos pocos miliamperios - opto versiones de una ESC no funcionan por supuesto. Guesstimated alrededor de 800 cortes entre recargas - digamos 20 cortes por día, que es 40 días - no está mal - mejor que mi taladros Makita menos :-)
Por supuesto puede utilizar un cepillado del motor sin toda la parafernalia externa - pero donde la diversión en eso (y no sería un 'ArduSaw' :-))) - y 'inrunners' no tiene absolutamente el mismo par todos modos :-)