Paso 5: Soldadura electrónica
Tiempo para las modificaciones real! La batería original que el heli era recargable, pero bastante pequeñas. Además, el controlador de láser funciona de 3 voltios. La LiPo original daría 4,2 voltios hasta 2,7 voltios, que potencialmente podría dañar el conductor. El servomotor había requerido originalmente 4.5 a 6 voltios, pero el motor pelado funcionará a mucho tensiones más bajas, por lo que será aceptable. Con todo esto en mente, podemos asumir con seguridad que un medio agradable de 3 v todo funcionará muy bien. Con dos pilas AAA, obtendrá la energía que necesitamos y una mayor duración para arrancar. Sólo asegúrese de utilizar baterías no-recargables regulares (recargables baterías no nos dan suficiente voltaje, y todavía no sería capaces de utilizar el construido en el circuito de carga)!
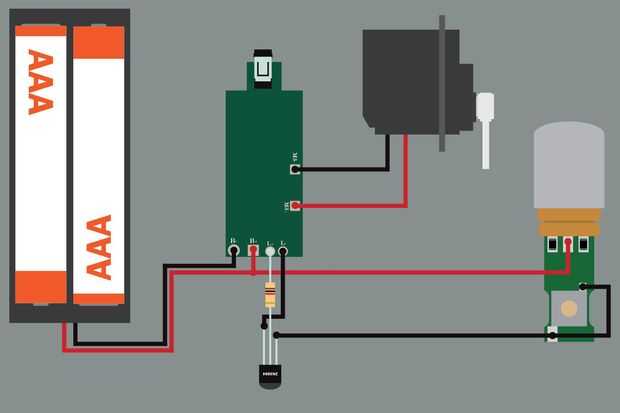
La soldadura de las conexiones de la batería a los B + y B-cojines en la PCB.
Soldar el cable del ánodo (rojo) del láser con el pin de B +.
Suelde el cable cátodo (negro) desde el láser hasta el colector del transistor (el pin más a la izquierda en el lado plano).
La soldadura de la resistencia de 1K desde el L + el pad a la base del transistor (el pin central).
Soldar el pin del emisor del transistor (el pin más a la derecha al mirar el lado plano) para el L-pad.
Suelde los cables del motor a los M + y M-pastillas respectivamente. La polaridad no importa para esta conexión, ya que sólo podemos voltear el cuerno del servo para que coincida con el movimiento que queremos.











")

