Paso 4: WiiMote seguimiento (solución de HardWare)



El año pasado he intentado encontrar hacia fuera si fuera posible conectar un blob de PixArt cámara de seguimiento directamente a Arduino. Yo sabía tanto hablaban I2C y en teoría debería ser posible
Ahora que tienen, es momento de intentar crear un hardware sólo seguimiento arpa láser. Hay dos fuentes de información hacia fuera allí – uno de Johnny Lee a sí mismo y la otra de Kako
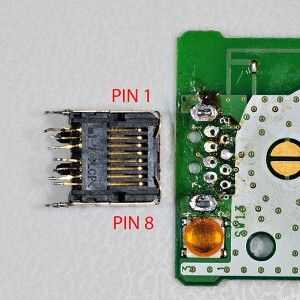
Para empezar, tenemos que conseguir el sensor del WiiMote, puede desoldarlo o sólo cortar la Junta (adiós WiiMote
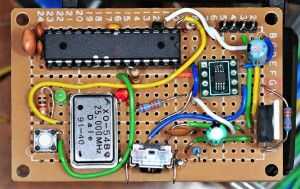
A continuación necesitamos proporcionar una señal de reloj de 25Mhz y 3.3V regulador para alimentar la cámara.
El Arduino tiene una 3.3v línea, pero creo que usted es mejor apagado con un regulador independiente.
Ahora el * realmente * poco complicado. Necesitamos añadir un LTC4301L 5v / 3.3v I2C chip del almacenador intermediario. Estos sólo viene en formato MSOP y es como montaje superficial – muy difícil de soldar.
Los adaptadores están disponibles para convertir el MSOP a más manejable factor de forma DIP
Casi puedo soldar estas cosas ahora, pero me tomó un par de va a conseguir "el knack". Pedí 3 de las fichas – por si acaso.
Descargar y ejecutar el sketch de Kako deben recibir todo funcionando,
Acabo de terminar la primera pasada de la biblioteca de objetos de C++ para acceder al sensor del WiiMote/Pixart desde un Arduino. Un ejemplo sencillo incluido en la biblioteca.
Se montaron este detector junto con dos detectores estándar de TAOS en una caja metálica limpia que encontré.
El Arduino segundo relé los datos MIDI desde el cuerpo de arpa y mezclar en la información de controlador MIDI basado en las lecturas tomadas desde el sensor de Pixart. Por esta razón el puerto de salida MIDI se ha trasladado a la caja del detector.
Tengo algún software simple relé serie corriente de datos MIDI, solo necesito para obtener la función de 'merge' va.



")









