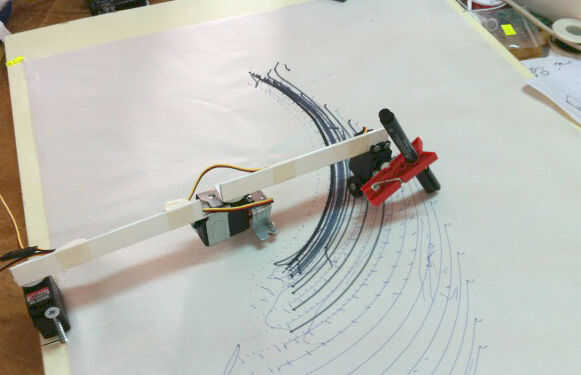
El plan era que un servo como un "hombro" girando una pieza de aluminio que se conecta a otro servo actúa como un "codo" de mover otra pieza de aluminio y al final tiene un final servo a mover arriba y abajo una pluma en el papel.
En cuanto a control - arduino fue la elección, pero hemos querido añadir otra pieza que es una manera de tomar fotos, procesarlas y tienen la capacidad de jugar con diferentes formas de procesar las imágenes. La arquitectura final fue un poco (demasiado) sofisticada - simplemente porque teníamos un gran equipo de gente increíblemente talentosa...
Un corto video del robot en acción está disponible aquí:

")








")


