Paso 2: mecánica
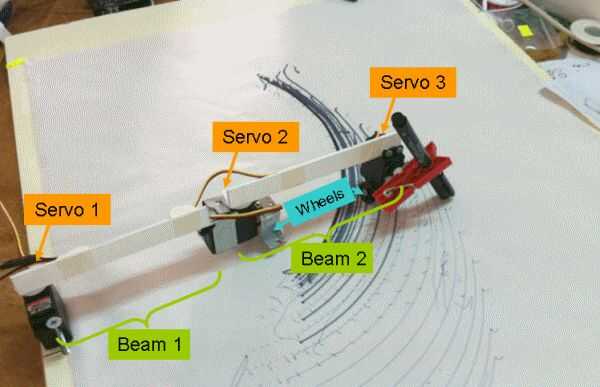

Servo 1, Servo 2 estuvo a cargo y el movimiento del brazo como se explicó antes, Servo 3 fue el servo que el lápiz del papel.
Los dos mayores desafíos fueron apoyando el peso del peso propio brazo robot (ya que el brazo no es muy rígido) que se hizo conectando cada movimiento paso a paso (pasos 2 y 3) una pequeña rueda de plástico, que fue tangente al círculo creado por el motor servo (servo 2 la rueda era tangente al círculo de servo 1 rueda 3 era tangente a servo 2) y la construcción de la estructura para ser tan rígido como sea posible (cualquier flexibilidad en la estructura generará inmediato "blur" en la pintura). Servo 1 se montó en la tarima, por ensayo y error pensamos la mejor zona para la pintura y el resto es historia.

")








")


