Paso 2: La configuración de control remoto y el código
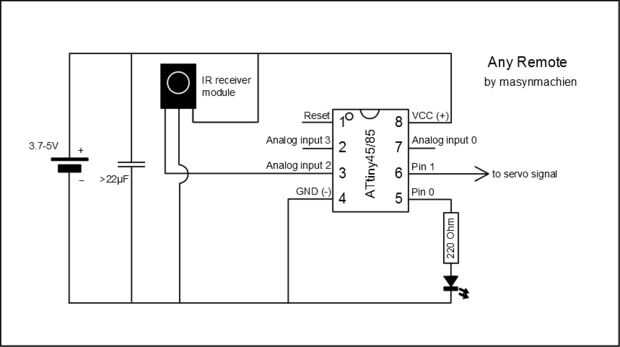
Los controles de microcontrolador ATtiny el la señal de un módulo de receptor de infrarrojos. Los filtros de ese módulo. El módulo de receptor IR automáticamente se encarga de limitar la recepción de señales moduladas a 38 kHz (o cerrar), típico para controles remotos de TV y aplicaciones relacionadas (en realidad, cuando se toman fotografías noté también reacciona a un flash).
Como no más de 90 milisegundos han pasado (el intervalo más largo que se producen en común códigos infrarrojos) lo ATtiny envía una señal al servo lo que se mueva de izquierda a derecha. El movimiento del servo cambia de puesto el centro de gravedad, haciendo que el robot a tambalearse.
Mientras que experimentar para reducir el proyecto de Zappelin Arduino a un ATtiny hice una instalación de mando a distancia simplificado. Cuando cualquier señal de infrarrojos es recogido, es decir sin comprobar cualquier código para determinar qué control remoto utiliza o botón que se presiona el servo realiza una acción.
Esta 1 función y mando a distancia no discriminatorias configuración obviamente tiene limitaciones importantes, pero también tiene aplicaciones, como el Wiebelbot como un compañero de la televisión.
Solía el IDE de Arduino y un Arduino Uno programa el ATtiny como explica muy bien aquí. La base que usé es este.
El programa (sketch) se agrega a esta página como un archivo zip. El esquema se repite en el pdf.
Cómo obtener un ATtiny lee la señal de un módulo de receptor IR que aprendí de este fascinante proyecto.
Controlar el servo desde el ATtiny se hace con esta valiosísima pieza de código de la biblioteca: Servo8bit
Después de descargar, copiar la biblioteca de Servo8bit bajo la carpeta de las bibliotecas de Arduino. Una advertencia importante cuando se usa el), es que el ejemplo de las bibliotecas. De lo contrario consigue agregado el código subido y ejecuta sobre el ATtiny después de un ciclo de su propio programa. Llame a la biblioteca de Servo8bit y utilizar las funciones como se muestra en el código agregado.
Cuando se utiliza esta biblioteca, la función de retardo está inactiva (tiene que ver con el doble uso de temporizadores). Por lo tanto usé el millis y micros funcionan para controlar tiempos. Usé la función de micros con futuros proyectos en mente, proyectos que tratar para una mejor interacción entre IR descifrar y servo de comandos. Con el proyecto de Zappelin, rápidamente corrimos en limitaciones en esa zona. En este proyecto de Wiebelbot no es cualquier interpretación del código de IR hecho todavía, pero es un comienzo para explorar un enfoque alternativo.













