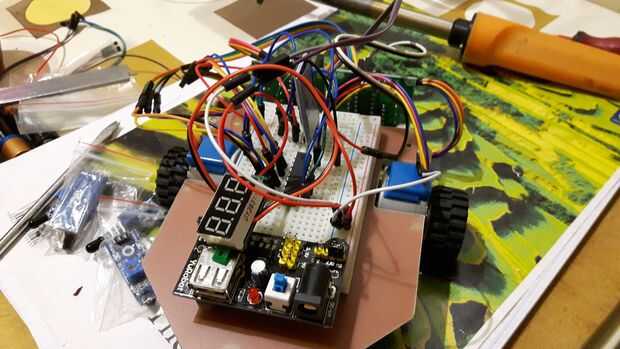




Aquí he querido presentar un bosquejo de la robusteza del vehículo. El corazón del robot es el microcontrolador ATtiny2313. Coche robot son los 2 motores paso a paso. La inspiración para la construcción de mi robot fueron otros proyectos. En la mayoría de los casos son proyectos basados en el Arduino y servomotores. En mi caso no utilizo la plataforma Arduino.
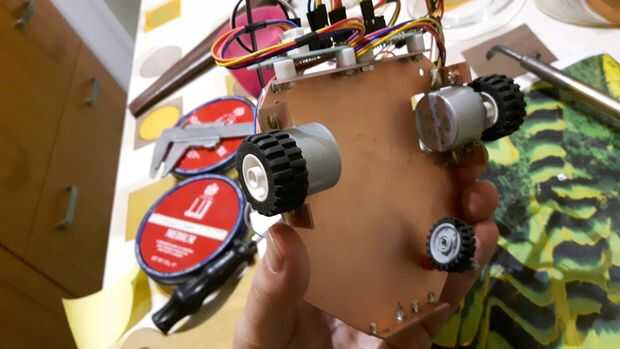
Software para mi Attiny en C. Como se mencionó anteriormente, he utilizado en lugar de servomotores motores paso a paso. Es control de robots de precisión poderoso. Paso a paso motores trabajan independiente lo que permite la torsión derecha e izquierda. Sin embargo, la desventaja de usar motor de pasos es la baja velocidad de rotación que se traduce en una velocidad del robot. Como se puede ver en el video, mi robot no es demasiado rápido ;-) Motores de pasos adicionales que tienen un engranajes internos. Sin embargo, en cuanto a la precisión de control estoy muy contento. La rueda delantera está tomada de Lego de mi hijo.
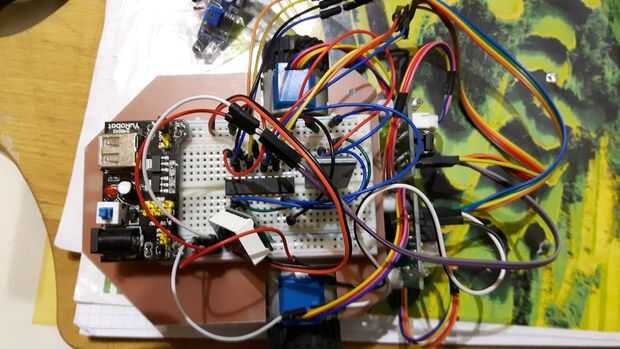
El robot del sistema fue hecho en el PCB. El contorno de la placa, cortar en mi máquina cnc casero (DIY). Para la energía, puede utilizar baterías o alimentación externa. Por lo tanto. que el robot debe ser inalámbrica que utiliza una batería recargable que se colocan en la plataforma inferior del robot.
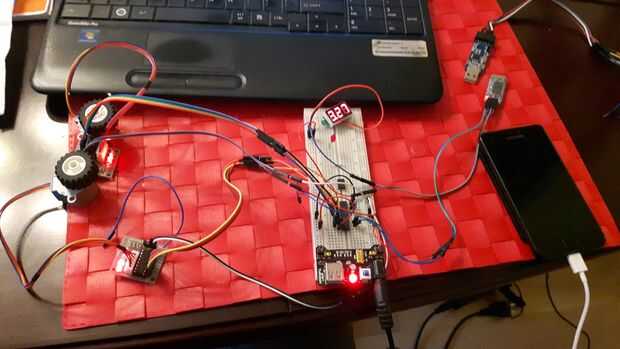
Para comunicarse con un robot usa el HC06 módulo bloototh y Smartphone con android. En mi caso, tomé la aplicación universal para enviar caracteres a través de Bluetooth (utiliza la aplicación: Bluetooth SPP Pro).
Como previamente corazón robot es el microcontrolador ATtiny2313. El propósito del sistema es ejecutar comandos desde tu teléfono android o tablet. Cada signo del código ASCII se traduce en la cantidad apropiada de microstepping impulso. Si el robot es ir directamente en ambas ruedas deben girar en la misma dirección en el caso de giro de que la rueda debe girar en sentido contrario. Para ello, el programa ha sido creado 4 funciones motor control
1. LL - primera izquierdo y segunda izquierdo motor
2. LR - motor de primer y segundo motor izquierdo derecho
3. RR - primer motor derecho y el segundo derecho
4. RL - primera bicicleta derecha e izquierda segundo motor
El código fuente en C interesado que puedo enviar correo electrónico.
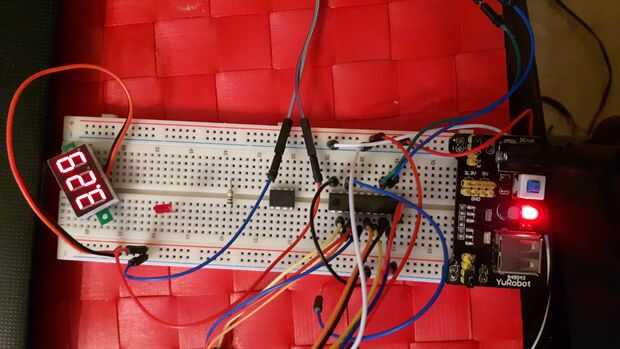
Aquí están las fotos y la escena de la obra.
 con Arduino y Android(bluetooth)")


")






")
