Paso 4: El circuito
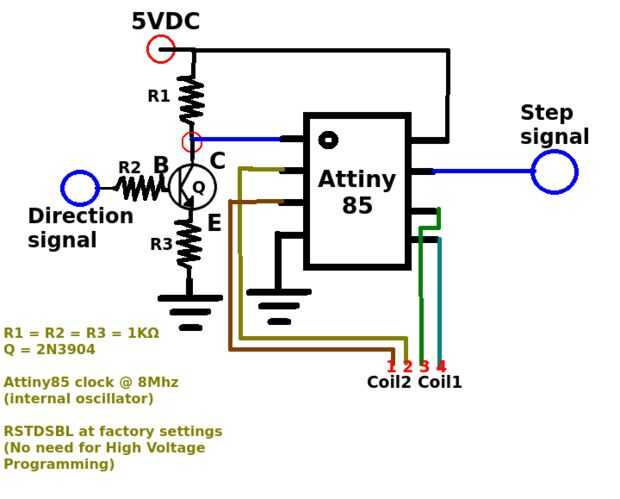
Este es el circuito.
Estamos utilizando el Attiny en frecuencia estándar, reloj interior, sin cristal externo. Usando pernos de 6, 7, 2, 3 para los cables del motor paso a paso. Cada lado del chip se utiliza para una bobina. Un motor paso a paso tiene 2 bobinas en su interior, dos extremos de ambos son sus cables.
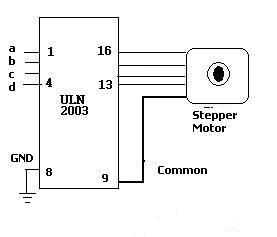
Para motores unipolares
Todos 4 de ellos tienen que ir a una matriz de transistores. TIP120 es una buena idea, o un ULN2003 que contiene 7 Darlington transistores (como el TIP120) capaz de 500 mA cada uno. Se trata de un circuito común y usted puede encontrar fácilmente. He añadido uno. A, b, c, d el ir a la 6,7,2,3. Utilizar algunos "ensayo y error" para el pedido de conexión.
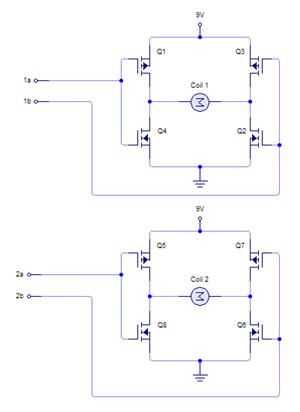
Para los motores bipolares
Todos los 4 cables ir a los puentes de H 2. Usted puede encontrar ICs que contiene uno o dos puentes de H por 2-3 euros (que puede subir a 1-2 amperios). El 1a1b, 2a, 2b son las señales para conectar a 6,7,2,3 de los Attiny en este caso... Otra vez, de ensayo y error es tu amigo... Tenga cuidado porque los puentes de h tienden a calentarse rápidamente si conectar al revés...
La señal de paso se lee en el pin 7. El microcontrolador está programado de manera que, cada vez se da cuenta de eso Perno 7 pasó de bajo a alto desencadenarán un cambio de combinación.
Yyyyyy... la señal Dir... Utiliza el pin RESET. No me no han liado nunca con los fusibles y no tengo la intención de no demasiado... En algún lugar hay una línea en la hoja de datos Attiny85 que explica que el microcontrolador se restablecerá si el pin RESET se va bajo 0.9V. Esto es técnicamente una señal baja. Pero ¿qué sucede si el voltaje es menor que 5V (señal de alta sin duda) pero más de 0.9V?










")


