Agarradores robóticos han sido siempre divertidas cosas para jugar. Agregar uno a un robot es como tener un juguete de control remoto Tonka desde mi infancia. En el pasado, donde un gran frente para construir y construir, pero con impresoras 3d, fresas de CNC y una amplia variedad de kits prefabricados pinza, pinzas hace muy fácil de añadir a tu proyecto ahora.
Quería hacer un simple bot con una pinza que fácilmente podía controlar desde un ordenador o una aplicación de teléfono. Tuvo que ser inalámbrica, ágil y fácil para mí hacer y cambiar para obtener equilibrio bajo el control de peso. Para este bot usé algunas de mis piezas de Actobotics para la construcción. Hicieron facilitando el bot y puedo hacer cambios mientras que progresó la construcción.
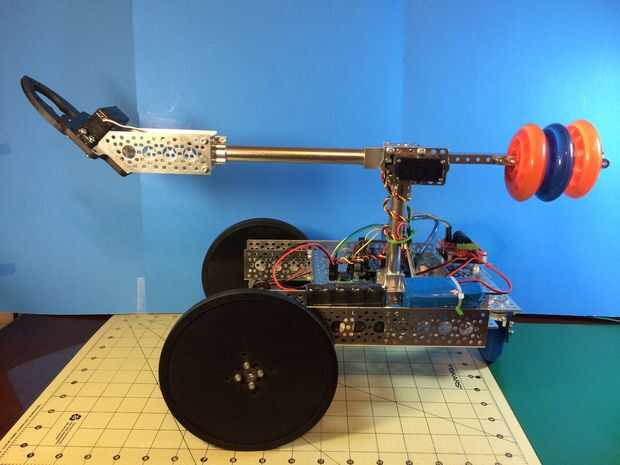
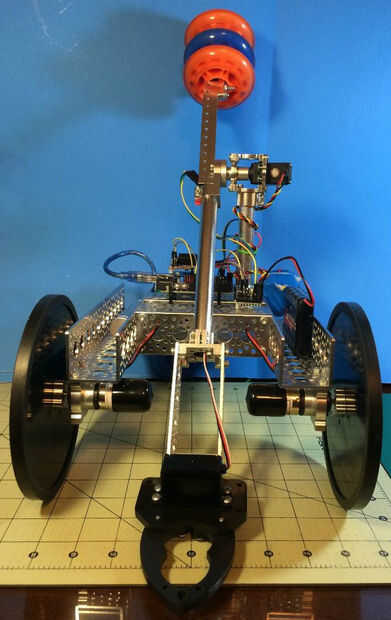
Este robot utiliza el canal de Actobotics y soportes para el chasis principal, 6" ABS ruedas impulsión (aunque 5" ruedas funcionaría igual de bien) una 2.9" patín rueda de la rueda trasera y un kit de pinza ABS de ServoCity.
Para la electrónica; Un clon de la ONU para el control de funciones, un RoboClaw para los motores impulsores y un controlador servo serie de Pololu. Una lista completa de las piezas se puede encontrar en el siguiente paso.
")










")

