Paso 2: Diseñar circuitos auxiliares
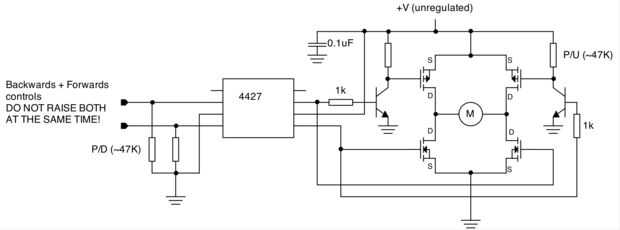
Esto es para un robot móvil, así que estoy añadiendo dos controladores de puente H MOSFET motor (se muestra el esquema de uno). Pero usted podría agregar una pantalla de LCD, hardware de comunicación USB/paralelo, apoyo a circuitos de fotodiodos, etc.. Dependiendo de tu nivel de habilidad, incluso algún tipo de bluetooth, Wi-Fi u otro centro de comunicaciones de RF.
Aplicarán principios básicos de diseño de circuito: lo que se agrega debe ejecutar la misma alimentación que el resto del circuito (en realidad, mis controladores de motor utilizará parcialmente energía no regulada, pero comparten una tierra común). No debe generar ruido que interfiere con el MCU, no deben crear picos de gran voltaje que podrían destruir el MCU y debe interactuar con él en niveles de tensión de corriente que puede proporcionar el MCU (por lo tanto, no sólo el conductor 4427, una conexión directa a los MOSFETs).
Por lo que para mi motor driver, voy a utilizar 4427 chips para conducir los MOSFETs, controlado por las señales de 5v corriente baja de la MCU. Voy a incluir diodos de protección EMF y condensadores de diversos tamaños y químicos para soportar los requerimientos de potencia del circuito. En términos prácticos, esto significa: un condensador electrolítico de 47uF y un cap de tantalio de 20uF. en paralelo a través de los carriles de la energía y un 0.1uF cerámica otro casquillo. a través de los carriles de la energía de cada IC, al igual que en el MCU.
(Un Consejo para el reconocimiento de MOSFET tipos del diagrama: la flecha siempre apunta a semiconductor N)
También voy a añadir que dos LEDs, un verde y un amarillo, controlado por el MCU. Sólo necesitan una resistencia de 1K ohm en serie con ellos, y puede enchufar directamente a un pin de repuesto. Se podrá utilizar como indicadores genéricos, que son muy útiles durante la depuración.



")









