Paso 3: Trípode




Mi diseño original utiliza dos cajas de CD de música. Parecían ser bastante robusto pero no demasiado pesada y sobre el tamaño correcto. Sin embargo, el plástico es algo frágil para trabajar con. Terminé con un montón de grietas y no muy estable. Así que mi próximo diseño usa una tabla de cortar de plástico rígido, recibí de mi primo.
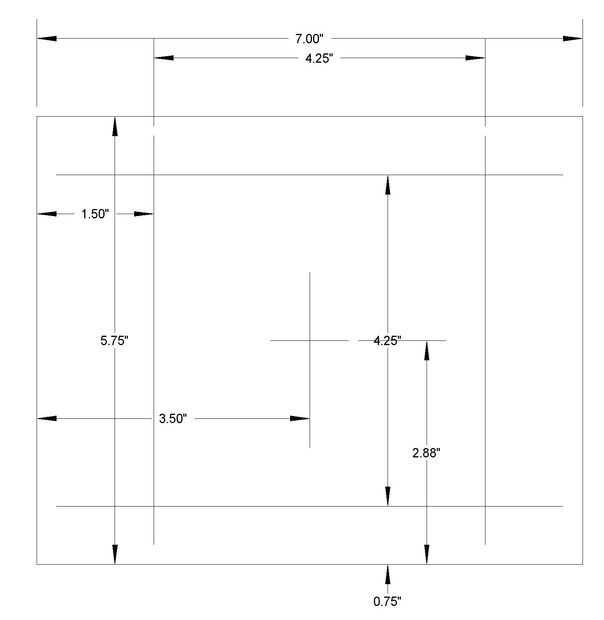
Diseño: Me decidí por un diseño de tres puntos con una pieza de plástico inferior y superior. La pieza inferior se une al trípode. La parte superior se une a la parte inferior con tres tornillos largos. La esquina superior izquierda es un punto de pivote fijo, el superior derecho e inferior izquierdo las esquinas tiene tornillos conectados a motores paso a paso para que la pieza superior puede nivelarse. Después de los problemas que tuve con los casos de CD, decidí diseñar esta un poco mejor y comenzó con un dibujo para la base. (Ver imagen)
Base del trípode:
Mi programa de CAD no es bueno y no soy muy bueno en uso, por lo que el dibujo no está muy claro. Desde el tablero de corte plástico, cortar 5 piezas ¾ "x 7".
En el centro marqué una X para el agujero donde va la tuerca del trípode.
Entonces dibujé cuatro líneas para ubicar donde van los tres puntos para los motores de pivot point y paso a paso.
Trípode:
En el centro, perfore un orificio de 3/8". Esto se determina por la medición a través de una tuerca de ¼ x 20. Los trípodes para usan la ¼ x 20 perno montaje de la cámara o en este caso mi accesorio. El agujero es un poco más pequeño que la tuerca.
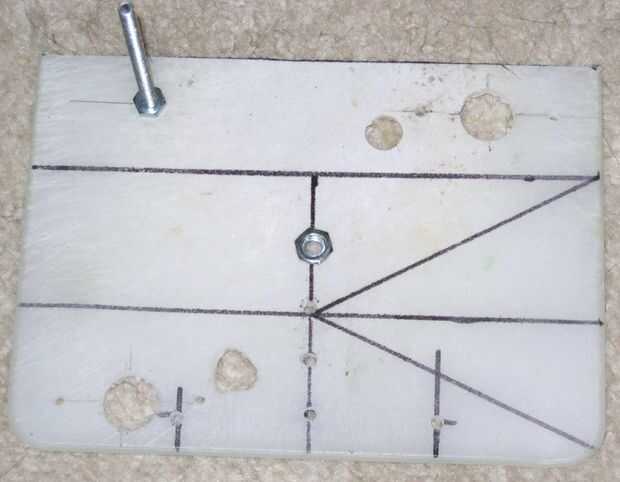
Para incrustar la tuerca: Enrosque una tuerca de ¼ x 20 en un tornillo. (La tuerca le da más peso con una llave para extraer la tuerca en el plástico) Poner una arandela en el perno. (Ver imagen) Deslice el perno por el agujero central de la pieza inferior y coloque una tuerca en el perno. (Ver imagen)
Centro de la tuerca sobre el agujero. Use una llave de 3/8" en la parte superior para extraer la tuerca de la parte inferior en plástico. (Ver imagen)
Medir y dibujar las cuatro líneas en la base. Elegir el rincón para el pivote. Elegí la esquina superior izquierda.
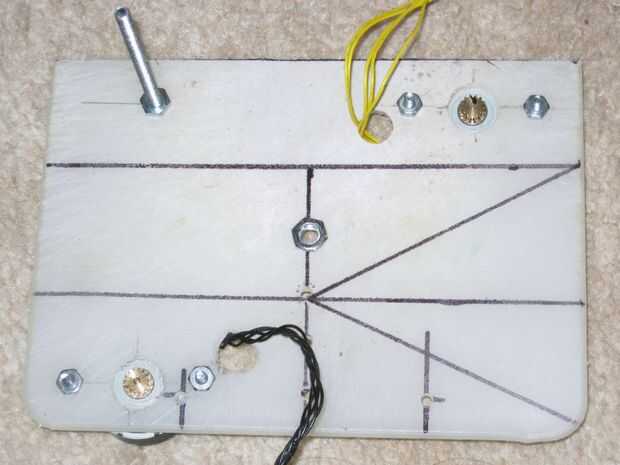
El superior derecho e inferior izquierdo las esquinas son las esquinas de motor paso a paso. (No se utiliza la parte inferior izquierda) Son 4.25" desde el ángulo de pivote. Para éstos, también desea marcar las ubicaciones para el montaje. He encontrado las especificaciones de los motores paso a paso de M35SP9. Los agujeros están separado 42mm o 21mm desde el centro.
Usé 10-32 hardware para los separadores. Así que perfore un agujero de 3/16" para el pivote. Usé 6-32 hardware para montar los motores paso a paso así que taladré orificios de 9/64" para los motores.
He dejado los engranajes sobre mi motores paso a paso así que taladré orificios 5/8" usando una broca de pala de los engranajes y tubos para pasar a través.
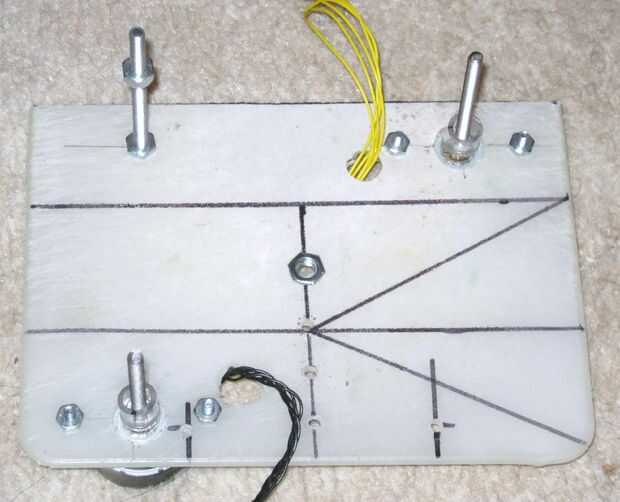
Pivote punto: El cerrojo sólo larga 10-32 que llevaba era 2 7/8" así que poner una tuerca en él, había atornillada a través del orificio del pivote y poner una tuerca en la parte superior. Pongo dos tuercas del perno enroscada alrededor de 1/2" para el punto de pivote y los apretó juntos.
Cerca del motor, también perforé dos agujeros grandes para los alambres pasar a través. Se montarán los motores por debajo pero el cableado irá a mi Arduino personalizado sobre la base.
Motores PAP: He instalado los motores PAP con hardware de 6-32. Cortar dos piezas cortas de tubo de vinilo de 7/16" y me coloqué sobre los engranajes. Entonces pegué dos estufa tornillos de 10-32 x 2" en la tubería. Si todo va bien, los tres tornillos se alinearán con el conjunto superior.

")




")

")




!")