Paso 4: acelerómetro
Teoría: Así que usted puede preguntar ¿qué es un acelerómetro? Pidió que yo mismo. Aquí está la definición de Wikipedia: "un acelerómetro es un dispositivo que mide la aceleración adecuada". Así que esto no ayuda mucho. Tienes que volver a su vieja high School secundaria física de la clase y recuerda que la gravedad también es aceleración, por lo que estos acelerómetros medirán inclinación debido a la gravedad.
Hice algunas investigaciones en acelerómetros. Su sensibilidad se mide en Gs (gravedad). Para ponerlo simplemente si está acostado, que es 0G (para X e Y) y es dado vuelta 90 grados entonces es 1.0G. Puede ir superior a 1,0 G si está en movimiento.
Acelerómetros tienen dos o tres ejes, X, Y y Z. Esto es como gráficos matemáticos. Me gusta pensar como este y el oeste, de norte a sur y de arriba abajo.
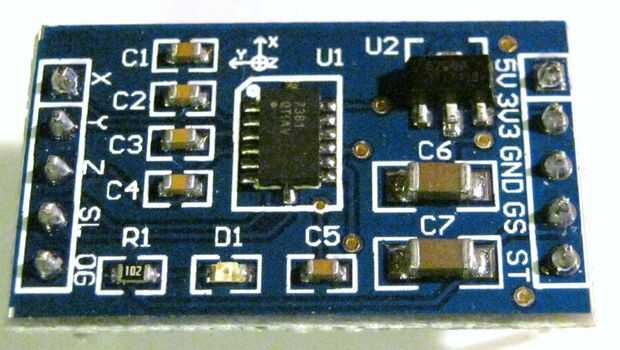
MMA7361: He seleccionado el módulo de acelerómetro MMA7361 por las siguientes razones:
Sensibilidad más alta es +-1.5G. Esto se traduce en una resolución teórica de 0,5 grados.
Precio ~ $11 para un módulo
Salida analógica. Mientras que muchos acelerómetros tienen salidas digitales, analógicas es más fácil trabajar con.
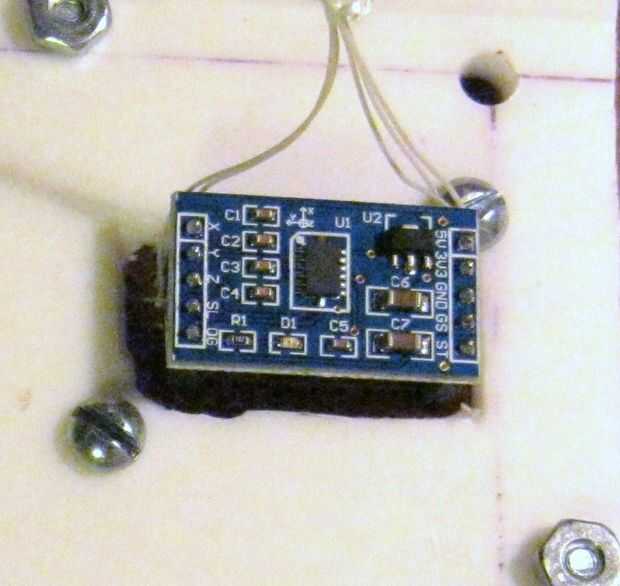
La orientación X, Y y Z se marca en el PCB. (ver imagen)
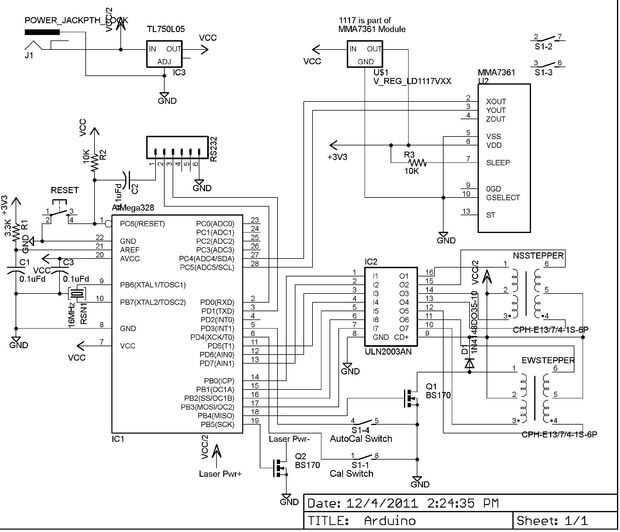
Technobabble: El IC MMA7361 tiene salidas analógicas. La salida de 'cero' es cerca de 1. 65V y la salida es 800mV/G. Con el sistema Arduino Aref a 3V, esto significa que teóricamente podemos medir aproximadamente 1/3 de un grado de movimiento.
Este IC MMA7361 es un 3.3V dispositivo pero el módulo tiene un 5V a 3.3V regulador en él. Mi esquema dice que es un RT9161 pero miré atentamente a mi módulo. El regulador es un 1117/3.3. Estos son típicamente nominal de 800mA y la IC MMA7361 requiere aproximadamente 500 mA. Voy a utilizar este 3.3V fuente a mi pin AREF Arduino que se sumará unos 0.1mA al regulador de la energía. No es un problema.
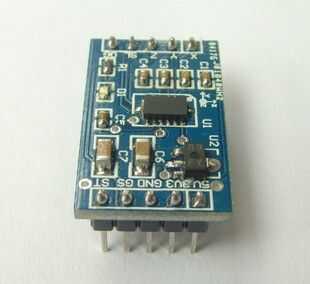
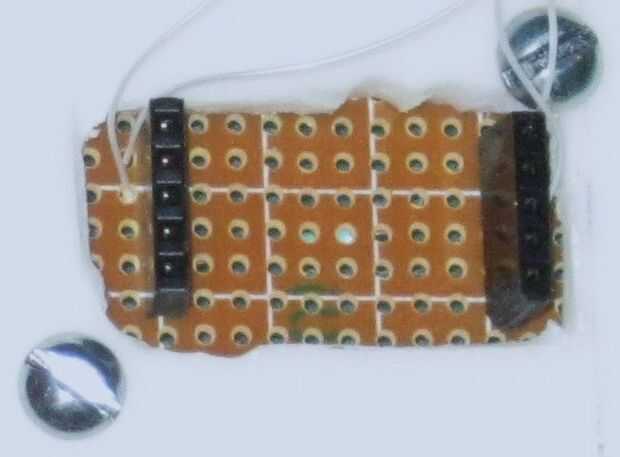
El módulo MMA7361 tiene 0,1" pins de cabecera en los lados (ver imagen). Así que para montaje del acelerómetro, utilizar otro pedazo de la placa de prototipo y agregó dos cabezales mujer 0,9" aparte. Ahora recuerdo la cabecera pins son mayores que 0,9" aparte pero que está bien cuando sólo lleva a cabo el módulo un poco más apretado. (Ver imagen) (En retrospectiva, probablemente debería haber usé 1.0" espaciado pero 0,9" funcionaba bien)
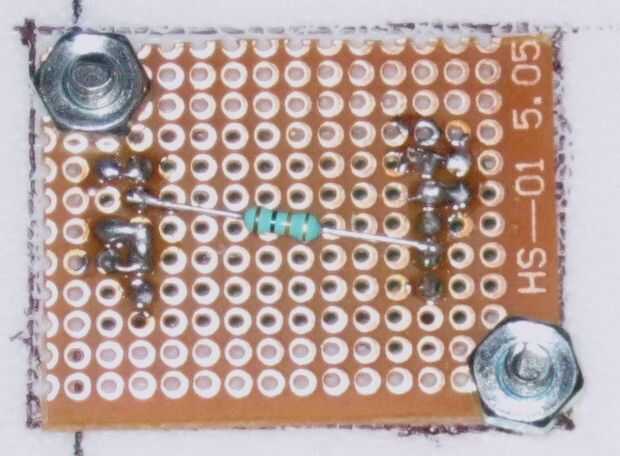
En el otro lado, había conectado GS(elect) a GND para que sensibilidad se fija en +-1.5G. Pongo un 10 resistencia k de SL(eep) a 3, 3V (no a 5V).
Entonces conecté 30AWG envoltura de alambre para 5V(Input power), toma de tierra 3, 3V (salida de Arduino) y X e Y (salidas de analógicas, Z no se utiliza. Z sería útiles si caía o aumento, como en un ascensor o un cohete).
También perforé dos agujeros del perno para el montaje en la protoboard.

")




")

")




!")