Paso 7: Arduino

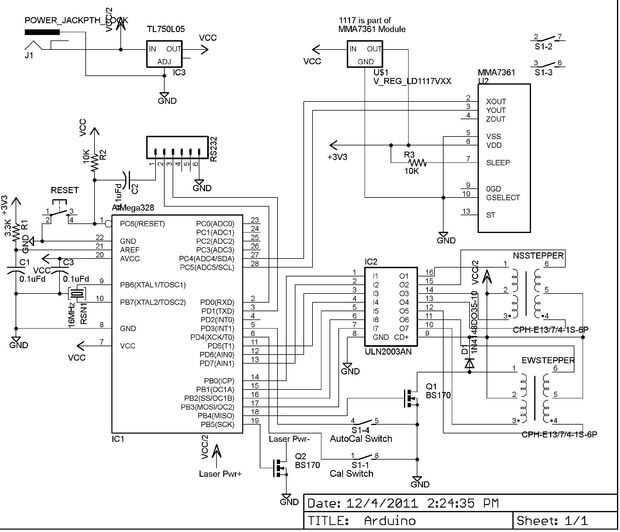

Diseño: El Arduino Lee las tensiones X e Y del acelerómetro. Si no son 'cero' luego envía señales a la East-West y norte-sur steppers motores. Los motores gire los tornillos que la plataforma superior. Así que cuando la plataforma esté nivelada, el acelerómetro se lee cero y los motores PAP se detendrá. Cuando es nivel, también aplique energía para el diodo láser.
También he añadido un par de interruptores. Como la Asamblea se barajan alrededor de puede perder calibración para que un interruptor lo pondrá en modo de calibración.
Los motores requieren más corriente y Arduino puede suministrar usé un driver Darlington ULN2003. Cada motor requiere de cuatro conductores. El ULN2003 tiene sólo siete circuitos. Así que añadí un FET BS170 para el octavo circuito. Los otros BS170 es para el envío de potencia al laser.
Potencia: El circuito de impulsión de laser es corriente constante, voltaje no es crítico pero se recomienda ser más 7Vdc. Para mayor comodidad he querido portátil usé seis baterías recargables del AA en el soporte de AdaFruit. Con las baterías de NiMh completamente cargadas, saca unos 8.4Vdc. Este suministro el láser y el paso a paso motores directamente. Puse un regulador de 5Vdc en la placa de Arduino.
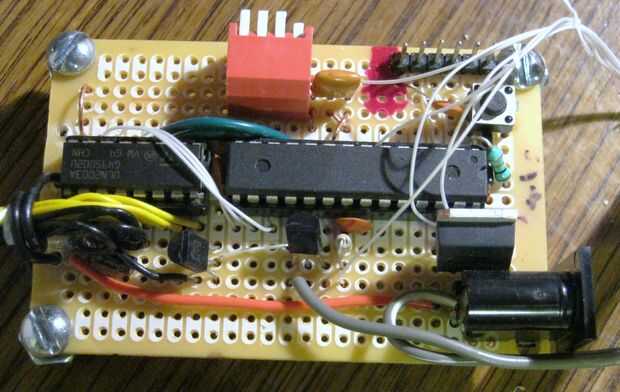
Montaje: El Arduino es el Arduino básico con reset ya que tengo en mi Arduino L.O.G. $10. Se coloca en el tablero de modo que hay espacio para el ULN2003. No voy a entrar en una Asamblea de punto a punto como estoy vago. Incluí un esquema y fotos de la parte superior e inferior.
Aclaraciones: Motores de pasos de Mitsumi M35SP9. Estoy usando software esquemático de águila. No pude encontrar nada cerca de un motor paso a paso así que utilicé un transformador centro aprovechado en su lugar. Los pernos no están numerados en el PCB Motor así que hice los números según el cuadro. Corresponden a los números de esquema. Estos motores tenían un conector con los cables (uno amarillo y uno negro) así que sólo por cable directamente a mi PCB de Arduino.
Soldado algunos abrigo blanco cables para el tablero de adaptador MMA7361, 5Vin, 3.3Vout, Gnd, Xout y Yout. Los otros extremos fueron a mi PCB de Arduino.
Tuve un jack de 2,1 mm que alambré para mi PCB de Arduino. El jack se conecta a la unidad láser.
Que sólo dos de los cuatro interruptores de tipo piano conectado.
Lo que llamé el conector RS232 se conecta a un USB-BUB o mi USB adaptador:
Yo también te los orificios perforados en la placa base para fijar la placa de Arduino. Realmente perforé los agujeros demasiado cerca al borde de la PCB por lo que interrumpió. Pero tenía lo suficiente para poner las tuercas en los pernos. Ya que mi precisión de perforación es mala, sólo obligados los pernos en la placa base y no se molestan en poner las tuercas en el otro lado.

")




")

")




!")