Paso 4: cableado
Utilizaremos Breakout Cable de Pixy de alambre este proyecto.
| Dispositivo de | Puerto del escudo sensor |
|---|---|
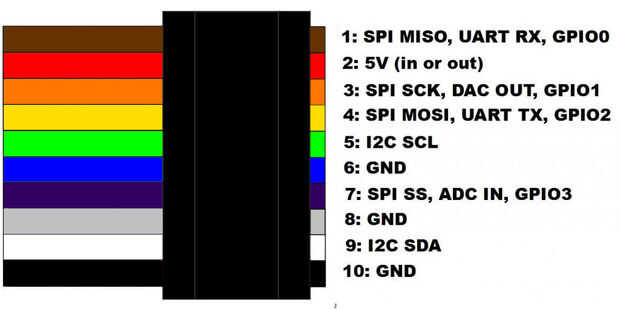
Alambre negro Pixy GND | TOMA DE TIERRA |
Cable rojo duende 5V (in or out) | VCC 5V |
Accionar el Servo RobotGeek 180 Servo | Pin digital 3 |
Bandeja de Servo RobotGeek 180 Servo | Pin digital 5 |
Tilt Servo RobotGeek 180 Servo | Pin digital 6 |
(Opcional) Láser White -'S' Black -'G' | Pin digital 10 |
Cable amarillo Pixy SPI MOSI, UART TX, GPIO2 | Pin digital 11 (a la de señal ' Pin) |
Cable marrón Pixy SPI MISO, UART RX, GPIO0 | Pin digital 12 (señal de ' Pin) |
Cable naranja Pixy SPI SCK, DAC OUT, GPIO1 | Pin digital 13 (señal de ' Pin) |
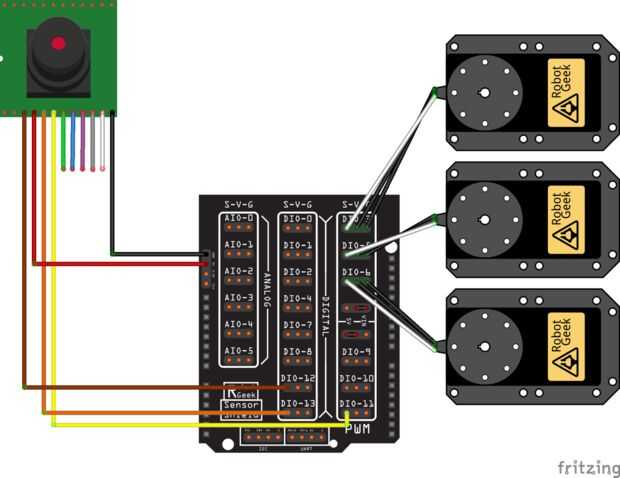
Tenga en cuenta que no todos los cables en el cable de arranque de Pixy se utilizan para este proyecto, con un poco de un lío de cables. Bridas son útiles para la gestión de esto.
Cuando realice el cableado con el protector del Sensor, ser consciente de sus puentes. Observe que el puente superior es VIN. Esto permite que su tablero de enviar energía directamente a través de tus servos.
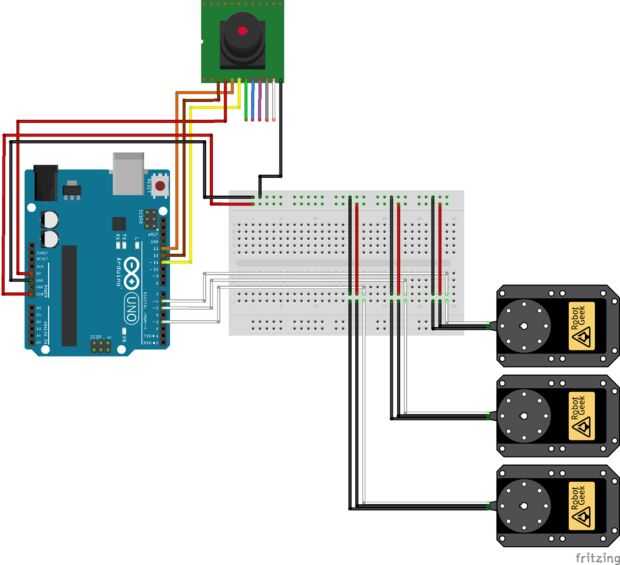
También esto puede alambre sin el protector del sensor usando un kit de pan/tilt, kit de pistola de dardos espuma, Pixy, protoboard, cables de puente y pines.
Tenga en cuenta que nos hemos conectado VIN en el riel de voltaje en la placa. Esto es ideal para los servos. No bajo ninguna circunstancia Conecte dispositivos de 5V en este carril. Hacerlo puede causar daños potencialmente irreversibles a su dispositivo.




")








