Paso 5: Movimientos de ubicación de la máquina.
Como norma, cuando se inicio su máquina $H serán no meterse con el eje cero puntos.
Así el X0 y Y0 deben permanecer igual después de autoguiado hacia el blanco la máquina.
Dicho esto, podemos utilizar este tiempo para enviar la máquina a una posición que siempre utilizamos para X0, Y0.
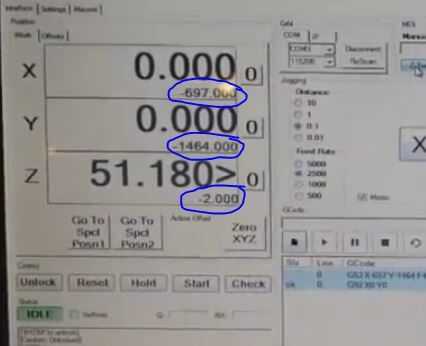
Buscar en el cuadro y en los círculos azules, esta es la posición de la máquina o lugar de X, Y, Z.
La razón principal de esto es que después de las casas de máquina, establece la ubicación de la máquina a cero en el punto de inicio.
Así que si llamamos a un G53 para mover la máquina a una ubicación de la máquina, entonces podemos duplicamos esto después de cada cambio de indicador de rumbo o herramienta.
Así que las 2 últimas líneas de G-code siguiente devuelve mi máquina a una posición de la máquina de Y-1466 de X-710 y después se establece esa posición a x0 y0 usando G92 X 0 Y0.
G90
G21
$H
M00
G92 Z0
G01 F1000 Z-20
F500
G38.2 Z-60
G92 Z0
G01 Z5
F50
G38.2 Z-7
G92 Z1
G01 Z30
F1500
F4000 Y-1466 G53 X 710
G92 X 0 Y0









")



")