Paso 7: eléctrico
Nuestro diseño mecánico había involucrado usando tres motores. Restricciones a la potencia de salida de Arduino Uno pin digital hizo una necesidad usar controladores de motor. Tuvimos dos tipos diferentes de controladores de motor.
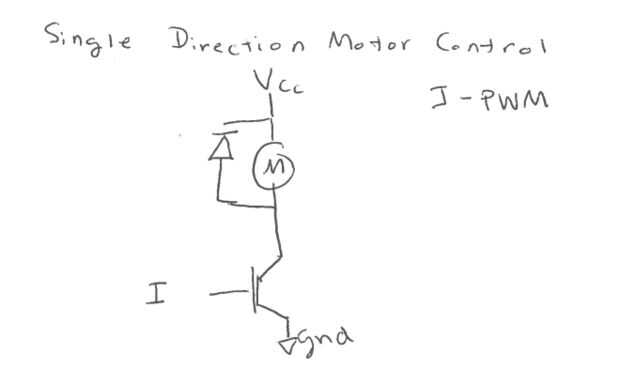
Conductor del Motor en una sola dirección
El motor utilizado para hacer girar la abrazadera para girar en una dirección. A continuación se muestra la figura para el conductor del motor en una sola dirección. El conductor del motor en una sola dirección consiste en un transistor, un diodo y el motor. El transistor se enciende con un pin PWM de Arduino, que nos permite configurar la velocidad del motor. Puesto que el motor actúa como un inductor, el diodo es necesario para que cuando se apaga la corriente a través del motor, el voltaje en el motor del punto no.
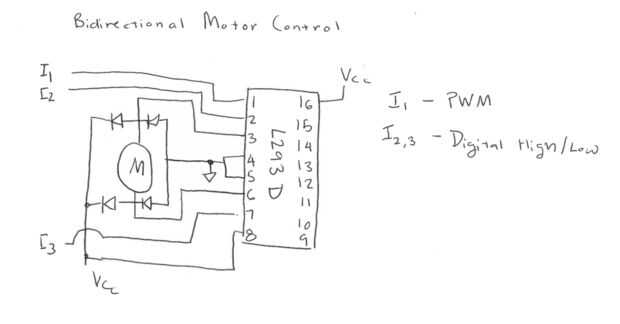
Controlador de Motor bidireccional
Los otros tres motores en nuestro sistema necesitan funcionar en ambas direcciones. A continuación se muestra el circuito de control del motor bidireccional. Es similar en concepto al conductor del motor en una sola dirección. Utiliza un chip L293D que se utiliza para crear un puente de H y el motor de accionamiento.
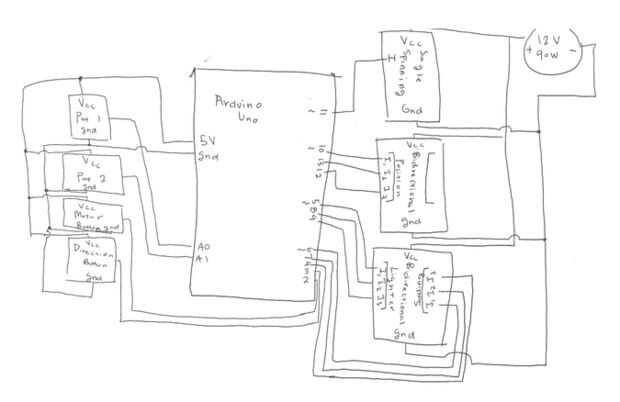
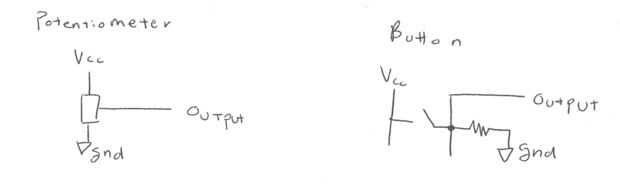
Sistema de Control de
Controlamos todo el sistema utilizando una combinación de interruptores y botones. Se alimentan de la Arduino 5 V y gnd pins. Los potenciómetros en el sistema se utilizan como interruptores que representa un uno o un cero. Hay cuatro motores y dos potenciómetros. Cada motor está asignado a un número entre 0 y 3, así que los interruptores se pueden fijar para elegir que motor a control. Un botón se utiliza para cambiar el motor actual a la designada por los interruptores y el botón se utiliza para controlar la dirección de ese motor y si está apagada o encendida.





![Cortador de botella de cristal fácil de partes comunes [actualizado... otra vez]](https://foto.askix.com/thumb/170x110/4/2b/42b18d8c3a9a784bc258c5d1fd185b0a.jpg "Cortador de botella de cristal fácil de partes comunes [actualizado... otra vez]")







