Paso 5: Configuración de prueba otra vez
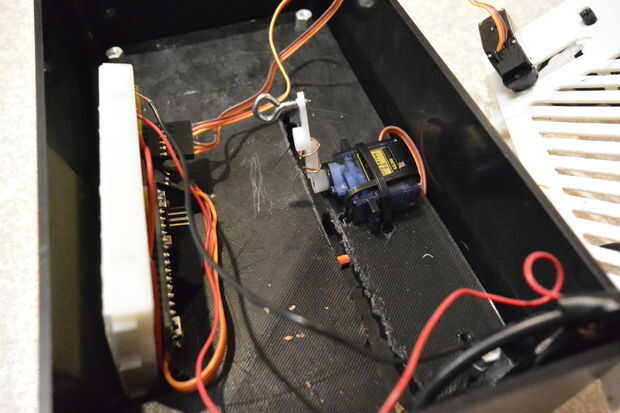
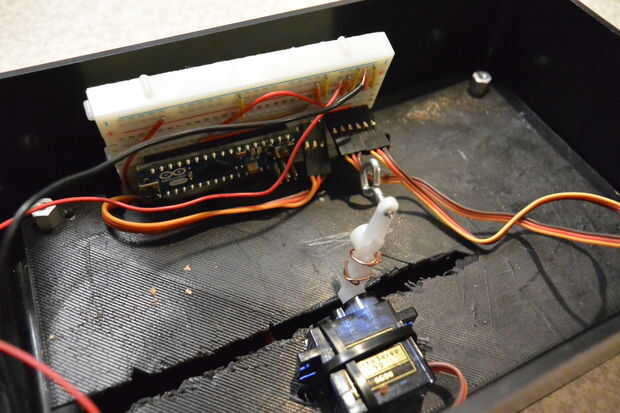
Antes de agregar la herramienta de corte es una buena idea para asegurarse de que su configuración funcione como desee. Una vez este programado el Arduino agregar la fuente de alimentación externa para los servos funcionar en. En el dispositivo de encendido debe mover los 3 servos a su posición de 'casa'. Después de llegar no debe hacer ningún movimiento.
Una vez usted verifique este Coloque un dedo sobre el sensor capacitivo. Esto debe activar el proyecto! Si todo ha sido conectado correctamente los dos servos en la tapa deben ajustar mover lejos del centro. (CCW para el izquierdo y CW para el derecho). Entonces el servo de transporte cigarro debe avanzar. Ahora los dos en la tapa volverá a su posición de inicio/corte. Finalmente el servo del cigarro regresará a casa.
En este punto queremos para asegurarse de que todos los servos están girando en la dirección correcta. Mirando mi servo de transporte puro, este motor debe girar CCW mirando hacia abajo en el engranaje para 'movimiento remite' y CW al 'movimiento hacia atrás'.







")





