Paso 2: Apilar el escudo del motor en el Arduino
El brazo robótico OWI tiene cinco grados de libertad y por lo tanto tiene 5 motores de corriente continua. 1 de los motores es responsable de la apertura y cierre de la pinza, 2 motores para mover izquierda y derecha y otros 2 motores para mover hacia arriba y hacia abajo. El Arduino será manejar sólo 1 motor, y también no serán capaces de potencia el motor completamente. Para mover 2 o más motores al mismo tiempo, hacemos uso del escudo del motor.
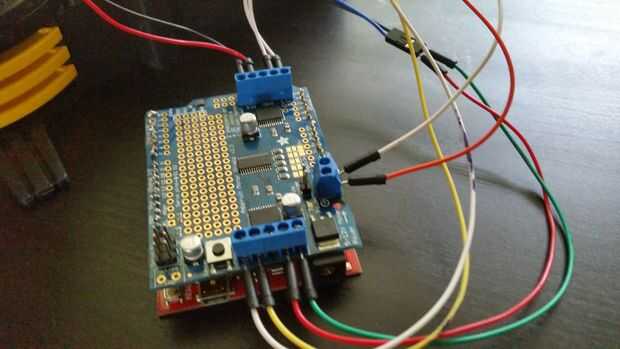
El escudo del motor se apila sobre el Arduino utiliza los conectores de perno masculino. Para obtener una mejor conexión, un lado de las cabeceras del perno son soldados a los pines correspondientes en el escudo del motor. El otro extremo de las cabeceras del pin están conectadas a los pines digitales de la placa Arduino. Además, el escudo del motor es alimentado por separado usando la fuente de alimentación externa. El Arduino es alimentado desde el USB o el conector de barril.
El escudo del motor puede controlar 4 motores a la vez. Ya que no queremos que todos los 5 motores a ejecutarse al mismo tiempo por cualquier razón, nos din't hacer frente a cualquier problema aquí.
Un código de ejemplo para mover los motores es como se muestra:










")


